Robot-001
Robot-001
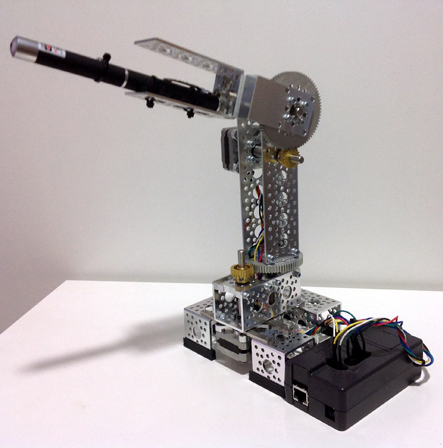
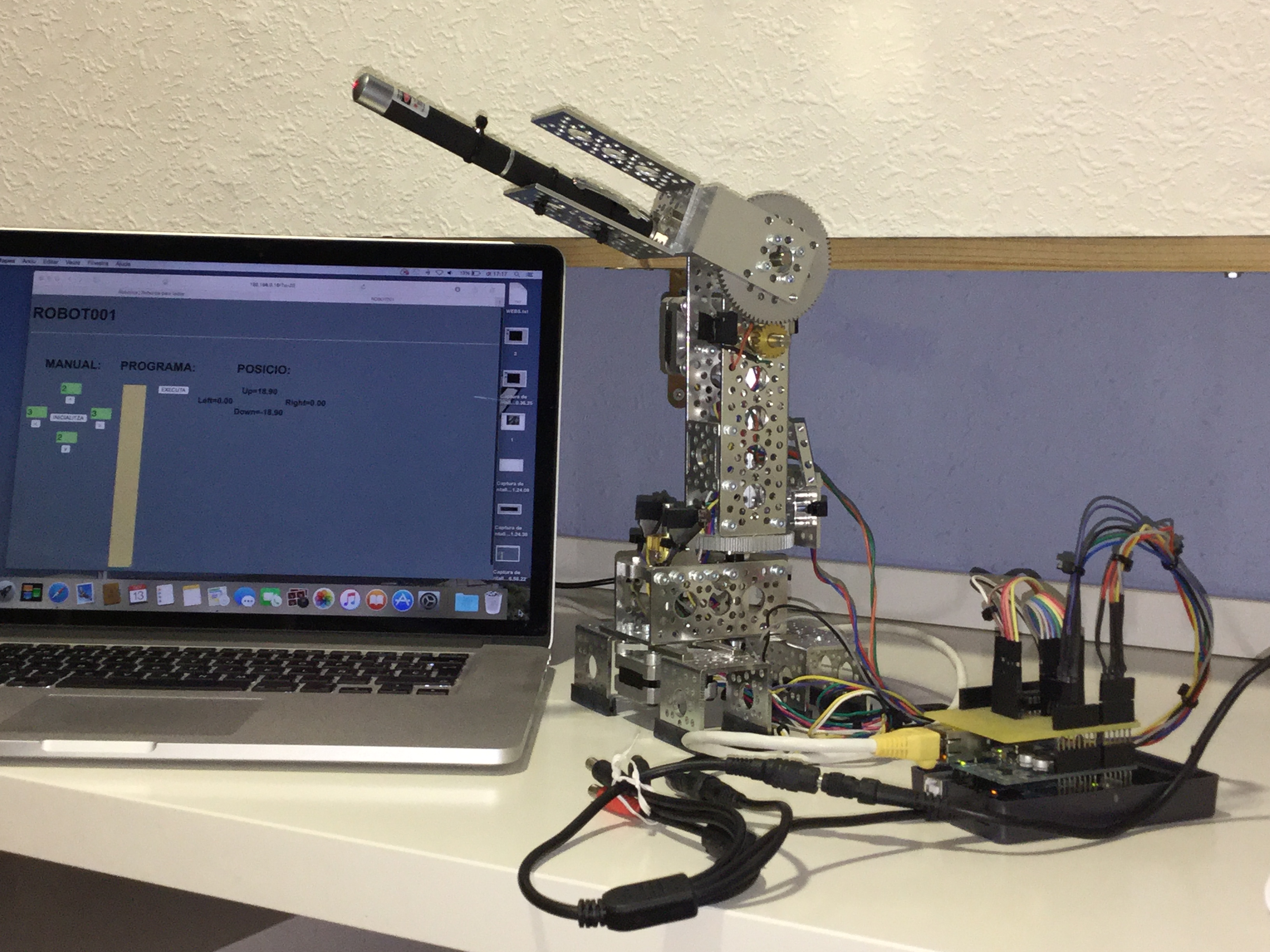
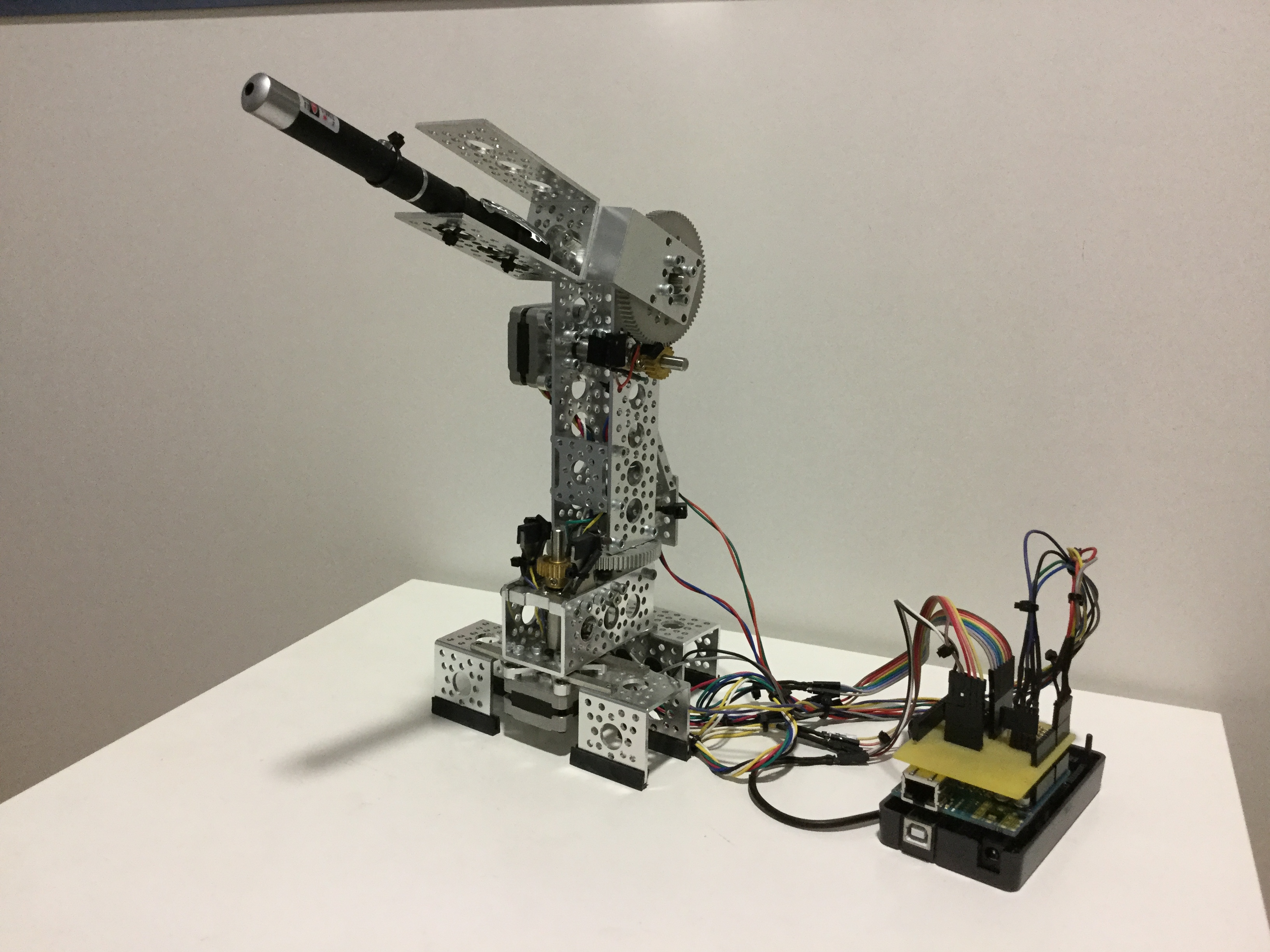
Se trata de un brazo robot, se pueden distinguir cuatro partes que constituyen el sistema robótico:
– Mecánica
– Electrónica
– Comunicaciones
– Programación
MECANICA
Está formada por la propia estructura del robot y dos motores.
Se trata de un robot con dos grados de libertad, es decir dispone de dos articulaciones. Una articulación permite una rotación en un ángulo azimutal (eje vertical), y la otra en un ángulo de altitud (eje horizontal).
| EJE | CORONA (nº dientes) | PIÑON 8 (nº dientes) | RELACION DE TRANSMISION |
|---|---|---|---|
| Azimut | 72 | 24 | 3:1 |
| Altitud | 76 | 20 | 3.8:1 |
Los actuadores son dos motores paso a paso unipolares.
| TIPO MOTOR | DIMENSIONES | ANGULO DE PASO | VOLTAGE (V) | INTENSIDAD (A) | PAR (Kg.cm) |
|---|---|---|---|---|---|
| Paso a Paso (Unipolar) | NEMA 15 | 1.8º | 6.5 | 0.5 | 0.8 |
La combinación de las características mecánicas del robot, y como este ha sido programado, permite la siguiente resolución angular.
| EJE | RESOLUCION (grados/paso) |
|---|---|
| Azimut | 2.4º |
| Altitud | 1.89º |
El Robot dispone de unos sensores de contacto que limitan el ángulo de rotación azimutal y de altitud, cuando el brazo alcanza el tope la rotación se detiene. El robot posee una posición de inicialización paralela respecto al suelo, partiendo de la posición de inicialización los ángulos máximos de funcionamiento son:
| EJE | INICIALIZACIÓN | ESTE | OESTE |
|---|---|---|---|
| Azimut | 0º | 105,6º | 103,2º |
| EJE | INICIALIZACIÓN | POSITIVA | NEGATIVA |
|---|---|---|---|
| Altitud | 0º | 202,23º | -34,23º |
ELECTRONICA
La electrónica que controla el robot está basada en el Arduino MEGA 2560 y el shield Arduino Ethernet. Por otro lado se ha incorporado un shield basado en el chip ULN2803A, que es el encargado de suministrar la potencia necesaria a los dos motores, y de regular el flujo de corriente en los sensores.

COMUNICACIONES
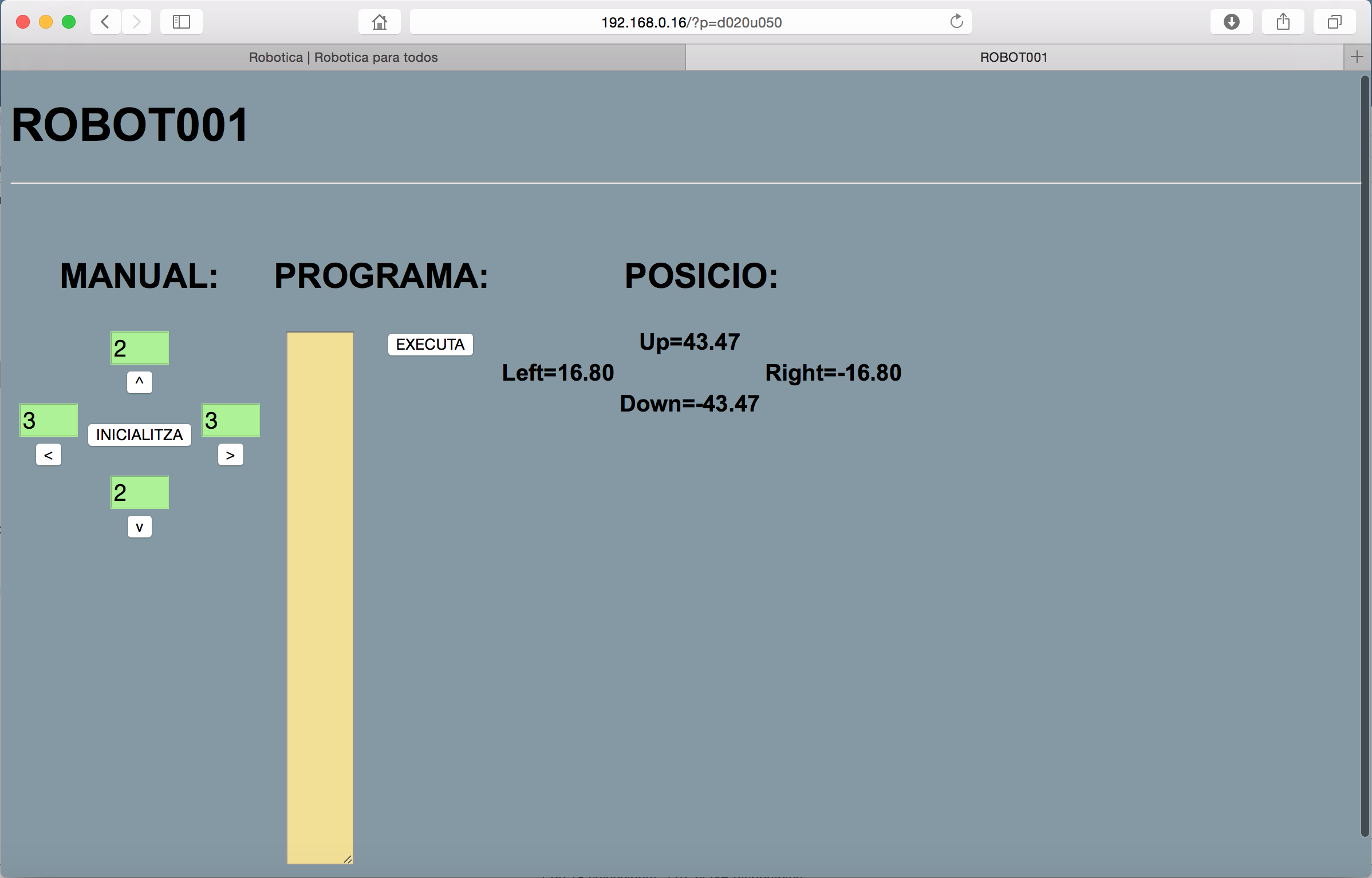
La comunicación se realiza mediante el protocolo TCP/IP, a través de una conexión Ethernet. Esto hace posible que el robot sea accesible desde Internet. Es decir, se puede ubicar el robot en algun lugar remoto e igualmente poder acceder a él. Al robot se le ha asignado una dirección IP y actua como servidor web, cuando nos conectamos al robot este retorna un formulario mediante el cual podemos indicar el ángulo y la dirección de rotación de cada uno de los motores.
PROGRAMACION
La programación del robot ha implicado dos aspectos fundamentales. Por un lado la programación de la tarjeta Arduino, configuración de las definiciones, programacion de las comunicaciones y programación del funcionamiento de los motores. Por otro lado la configuración de la página web (formulario HTML) que retorna el robot cuando nos conectamos a él, el código HTML se encuentra incorporado en el propio programa de la tarjeta Arduino.
FUNCIONAMIENTO
El robot tiene dos modos de funcionamiento:
- Manual: se indican directamente los grados de rotación que se desea que gire el brazo robótico en una determinada dirección.
- Programable: se puede indicar una serie de instrucciones que el robot irá ejecutando secuencialmente.
El formato de una instrucción es: IXXX, el conjunto de instrucciones es el siguiente:
UXXX (UP): desplazamiento de altitud positivo, XXX indica los grados de desplazamiento.
DXXX (DOWN): desplazamiento de altitud negativo, XXX indica los grados de desplazamiento.
RXXX (RIGHT): desplazamiento azimutal oeste, XXX indica los grados de desplazamiento.
LXXX (LEFT): desplazamiento azimutal este, XXX indica los grados de desplazamiento.
TXXX (TIME): detiene el movimiento del brazo, XXX indica el tiempo en segundos.
CXXX (CYCLE): a partir de esta instrucción, las instrucciones posteriores se repetiran en forma de bucle, XXX indica el número de bucles que se ejecutarán.
Finalmente comentar que cuando el brazo detiene su movimiento, la pantalla muestra la posición en grados del brazo robótico, si previamente se ha inicializado su posición.
VIDEO DE FUNCIONAMIENTO
Rover-002
Rover-002
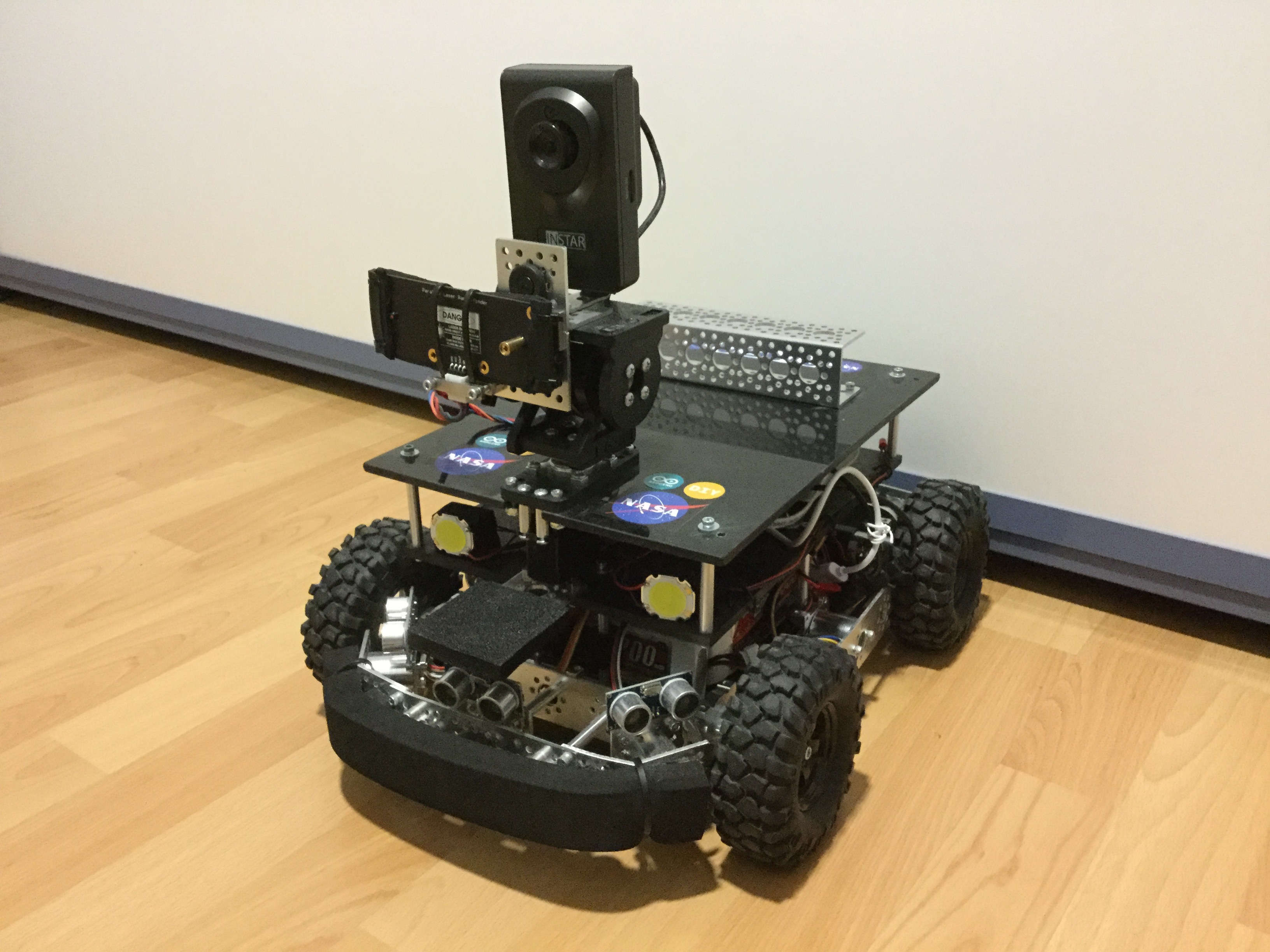
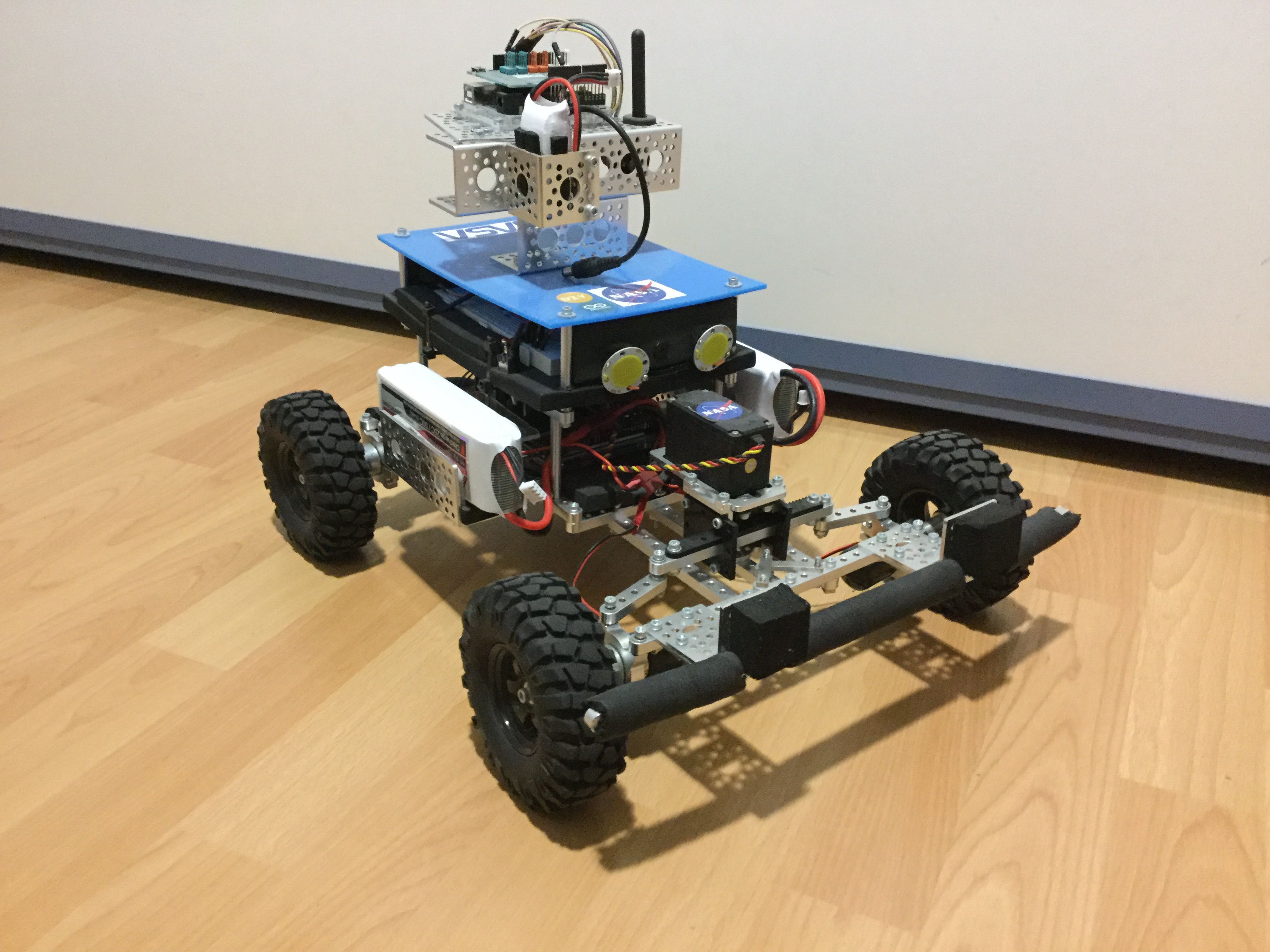
Se trata de una plataforma robótica controlada a través de una red wifi. El vehículo actua como un servidor web y cuando nos conectamos nos retorna una página web con unos botones que nos permite su control, tiene la posibilidad de funcionar en modo manual o modo autónomo; en modo autónomo él mismo detecta los obstáculos y cambia la dirección para no chocar con ellos, buscando siempre la dirección de mayor recorrido sin obstáculos. Sobre la plataforma se pueden ubicar difirentes elementos o dispositivos para efectuar tareas determinadas. Al funcionar a través de una red TCP/IP se puede contrlorar remotamente desde internet.
Se pueden distinguir cuatro partes que constituyen el vehículo:
– Mecánica
– Electrónica
– Comunicaciones
– Programación

MECANICA
Está formada por el chasis, con elementos de plástico ABS y aluminio; y cuatro motores , uno por cada rueda. El giro se realiza rotando las ruedas de un lado en un sentido, y las del otro lado en sentido contrario. Los motores están alimentados por dos baterías en paralelo de 11,1v; estas baterias suministran también la electricidad a los dos LED’s frontales (luz blanca) y los dos LED’s posteriores (luz roja).
| DIMENSIONES | |
|---|---|
| Ancho | 30cm |
| Largo | 40cm |
| Alto | 35cm |
| Peso | 5Kg |
| MOTOR DC DE ESCOBILLAS (x4) | |
|---|---|
| Rango de funcionamiento | 3v – 12v |
| Voltaje nominal | 12v |
| Velocidad en vacio | 116RPM |
| Corriente en vacio | 0,20A |
| Par de arranque | 115N.cm |
| Corriente de arranque | 4,9A |
| Potencia de salida de máxima eficiencia | 2,7w |
| Tipo engranage / relación | Planetario / 104:1 |
| BATERIA LIPO 3S AEROENERGY (x2) | |
|---|---|
| Voltaje | 11,1v |
| Capacidad | 5000mAh |
| Intensidad máxima en continua | 125A |
| Intensidad máxima en discontinua | 250A |
| Peso | 402g |
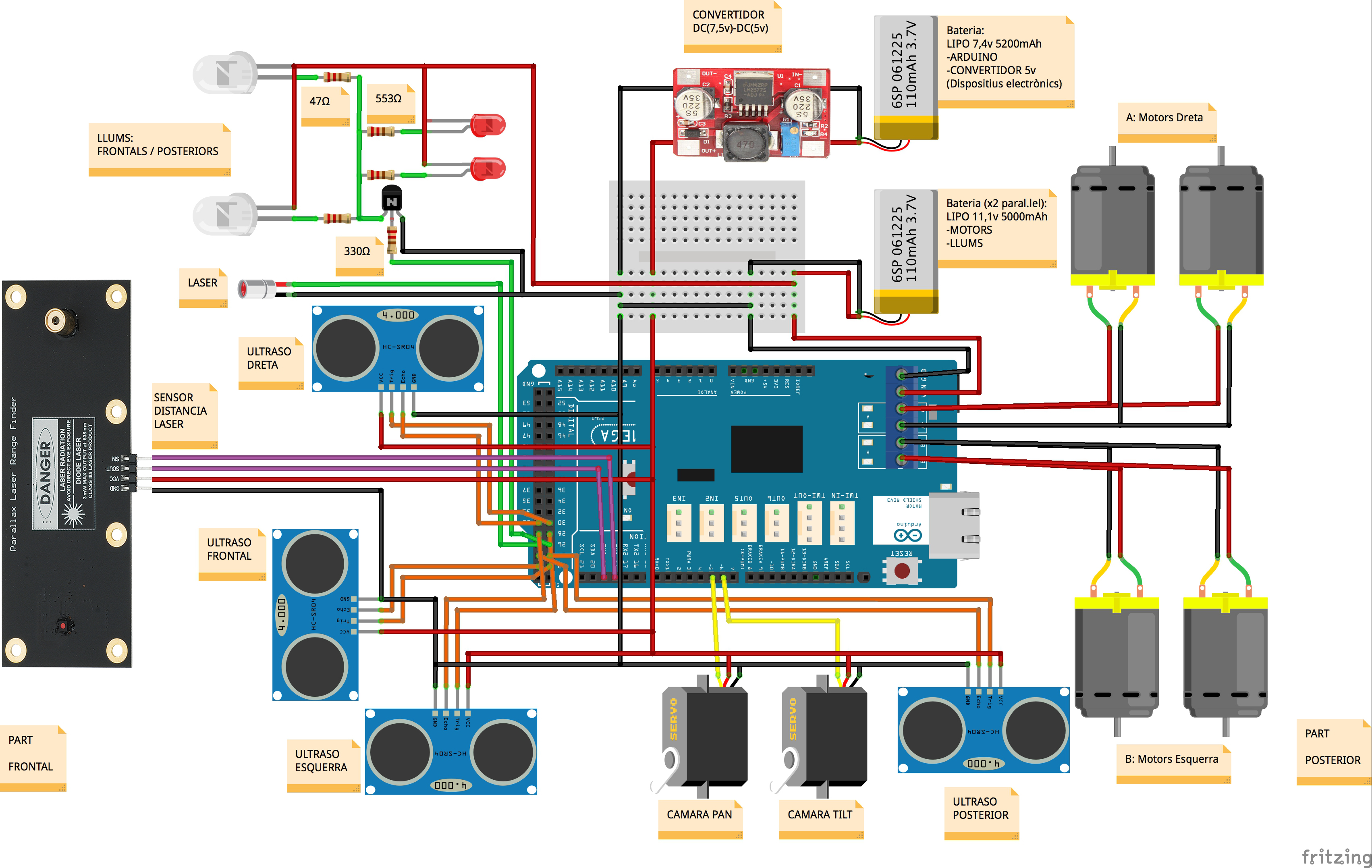
ELECTRONICA
La electrónica del vehículo se compone de la placa Arduino MEGA 2560, el Arduino Motor shield y el Arduino Ethernet shield. Sobre la placa MEGA 2560 reside toda la programación del coche y las conexiones con todos los componentes electrónicos del vehículo, el Motor shield suministra la potencia necesaria a los motores y el Ethernet shield está conectado a un router que genera una red wifi, propia del vehículo, que permite la comunicación a través de la red de cualquier dispositivo electrónico con el coche. Todo el sistema esta alimentado por una batería de 7,4v.
Por otro lado el vehículo lleva incorporados los siguientes dispositivos:
– LED’s: frontales (blancos) y posteriores (rojos) de iluminación.
– Sensores de distancia de ultrasonidos (x4): uno frontal, dos laterales y uno posterior. El frontal y el posterior detienen el coche si está a punto de chocar con algún objeto. Los dos laterales rectifican la dirección de avance para evitar la colisión, y no detienen su movimiento.
– Cámara IP: envia imágenes a través de la página web cuando establecemos la comunicación con el coche. Se puede controlar la dirección mediante dos servomotores que controlan la posición azimut/altitud (pan/tilt) de la cámara.
– Puntero laser: Al ser activado emite una luz laser que sirve como punto de referencia, su dirección está asociada al movimiento de la cámara IP.
– Sensor de distancia laser: Incrementa la sensibilidad en la detección de objetos actuando conjuntamente con los sensores de ultrasonidos. En el modo autónomo su sistema de detección de distancias determina la dirección que debe tomar el vehículo para seguir su movimiento, el sensor está ubicado en el sistema móvil azimut/altitud y efectúa cinco lecturas de distancia, la dirección que presenta una mayor distáncia sin obstáculos es la que tomará el vehículo.
– Servomotor (x2): Controlan el movimiento azimut/altitud de una estructura en la cual se encuentra ubicada la cámara (permitiendo controlar la visión de la cámara), el puntero laser y el sensor de distancia laser.
– Convertidor DC(7,5v)-DC(5v): Suministra 5v de tensión alos dos servos, a los cuatro sensores de ultrasonidos y al sensor laser.
| SENSOR ULTRASONIDOS HC-SR04 (x4) | |
|---|---|
| Voltaje | 5v |
| Corriente | 15mA |
| Frecuencia de funcionamiento | 40Hz |
| Detección de distancia | 2cm – 4m |
| Trigger | 10 microseg. |
| PUNTERO LASER | |
|---|---|
| Potencia | 2,5mW (clase 3R) |
| Longitud de onda | 660nm (rojo) |
| Voltaje | 3v |
| Corriente | <45mA |
| SERVOMOTOR HS-485HB HITEC (x2) | |
|---|---|
| Sistema de control (ángulo) | PWM (T=20ms)
-90º: 600microseg 0º: 1500microseg 90º: 2400 microseg |
| Voltaje señal | 3v – 5v pico señal cuadrada |
| Voltaje alimentación | 4,8v – 6v |
| Velocidad | 0,22s/60º – 0,18s/60º |
| Par de parada | 4,8Kg.cm – 6Kg.cm |
| Corriente sin carga | 150mA – 180mA |
| SENSOR LASER PARALLAX 15-122cm LASER RANGEFINDER | |
|---|---|
| Consumo | 5V / 150mA |
| Detección óptima (distancia) | 15cm – 122cm |
| Detección máxima (distancia) | 2,4m |
| CAMARA IN-6001HD WIFI BLACK (INSTAR) | |
|---|---|
| Consumo | 5v / 1,5A |
| Visión nocturna IR | 5m – 10m |
| Resolución mínima | 320 x 170 |
| Resolución máxima | 1280 x 720 |
| Relación de frames | 25fps |
| BATERIA LIPO 2S AEROENERGY | |
|---|---|
| Voltaje | 7,4v |
| Capacidad | 5200mAh |
| Intensidad máxima en continua | 130A |
| Intensidad máxima en discontinua | 260A |
| Peso | 275g |
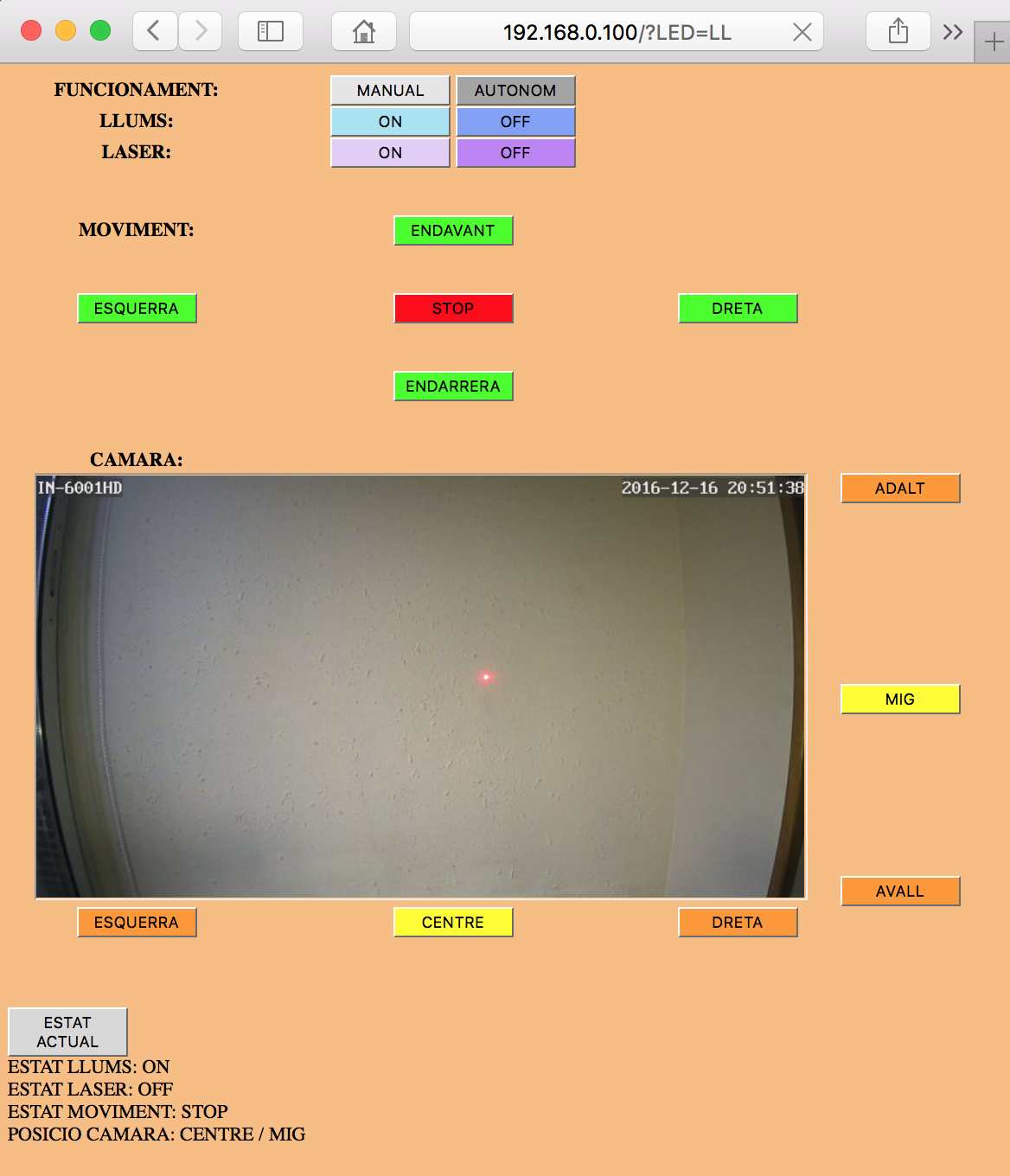
COMUNICACIONES
La comunicación se realiza mediante el protocolo TCP/IP, a través de una conexión Ethernet. Esto hace posible que el vehículo sea accesible desde Internet; permitiendo ubicar el coche en algún lugar desplazado e igualmente controlar su movimiento remotamente. El vehículo tiene asignada una dirección IP y actua como servidor web, cuando nos conectamos retorna un formulario mediante el cual le podemos indicar las ordenes al vehículo. El sistema de comunicaciones está constituido por:
– Shield Arduino Ethernet.
– Switch de cinco puertos ethernet, permite la posibilidad de conectar diversos dispositivos a la red vía ethernet.
– Router,genera la red wifi.
– Bateria (powerbank), alimenta todo el sistema de comunicaciones, y también la cámara.
| DEFINICIONES IP | |
|---|---|
| Router | 192.168.0.1 |
| Arduino | 192.168.0.100 |
| Cámara | 192.168.0.102 |
| ROUTER TP-LINK TL-WR802N | |
|---|---|
| Velocidad | 300 Mbps |
| Encriptación | WPA/WPA2 |
| Puertos | 1xRJ45 |
| Alimentación | micro USB |
| Consumo | 5v / 1A |
| SWITCH TP-LINK TL-SF1005D | |
|---|---|
| Puertos ethernet | 5xRJ45 |
| Velocidad | 10/100 Mbps |
| Alimentación | 5v / 0,6A |
| BATERIA SBS | |
|---|---|
| Capacidad | 20000mAh |
| Puertos | 3xUSB (5v – 1A/1A/2,1A) |
| Alimentación | microUSB |
PROGRAMACION
La programación del coche ha implicado dos aspectos fundamentales.Por un lado la programación de la tarjeta Arduino, configuración de las definiciones, programación de las comunicaciones y programación del funcionamiento de los motores y dispositivos electrónicos.Por otro lado la configuración de la página web (formulario HTML) que retorna el vehículo cuando nos conectamos a él, el código HTML se encuentra incorporado en el propio programa de la tarjeta Arduino.
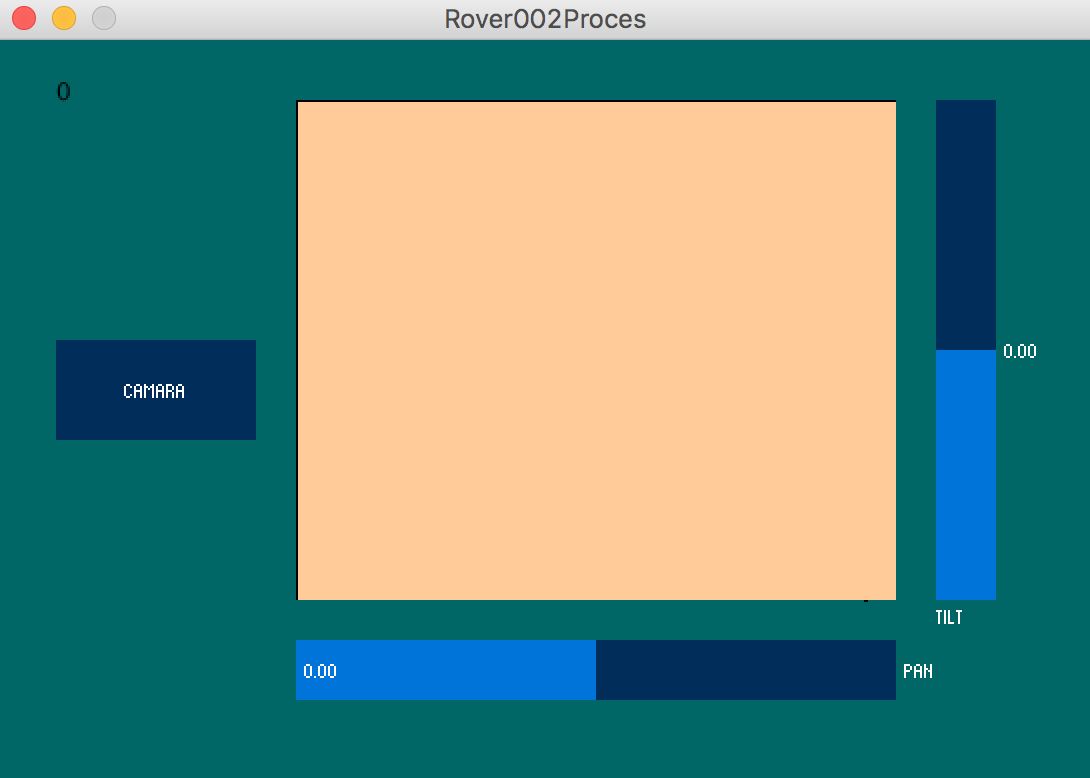
Se ha desarrollado también una aplicación en Processing que establece una comunicación UDP con el vehículo. La aplicación dispone de dos barras de desplazamiento para controlar los dos servomotores y de esta manera disponer de mayor flexibilidad para orientar la cámara; igualmente se orienta el sensor laser, de modo que se aprovecha para generar un diagrama de distancia al objeto más cercano, al mismo tiempo que envia un valor numérico en centímetros de la distancia a dicho objeto. La aplicación dispone también de un botón «camara» que abre una ventana (independiente de la aplicación html) donde se visualiza la imagen que enfoca la cámara.
FUNCIONAMIENTO
Para poner en funcionamiento el vehículo debemos conectar por un lado electronica del coche, por otro lado los motores, por otro lado las comunicaciones y finalmente la cámara. Para controlar el coche deberemos conectarnos a la red wifi, y posteriormente mediante un navegador conectarnos a la dirección IP del servidor (la placa Arduino actua como servidor web). La respuesta del servidor es una pagina web con unos botones que nos permitirá enviar ordenes al coche. La página dispone de un marco donde aparece la imagen captada por la cámara. Los sensores de ultrasonidos detenienen el coche en caso que se vaya a producir una colisión o rectifican su dirección. El botón autonomo permite al vehículo desplazarse sin la intervención humana, de manera que el propio coche se encarga de evitar los obstaculos y seguir la dirección más apropiada; para recuperar el control del coche hay que pulsar el botón manual.Los botones para enviar instrucciones al coche son:
MANUAL
AUTONOMO
Luz ON/OFF
Laser ON/OFF
Dirección IZQUIERDA/DERECHA/ADELANTE/ATRAS/PARAR
Movimiento cámara AZIMUT/ALTURA
ESTADO DEL VEHICULO
VIDEO DE FUNCIONAMIENTO
Rover-003
Rover-003
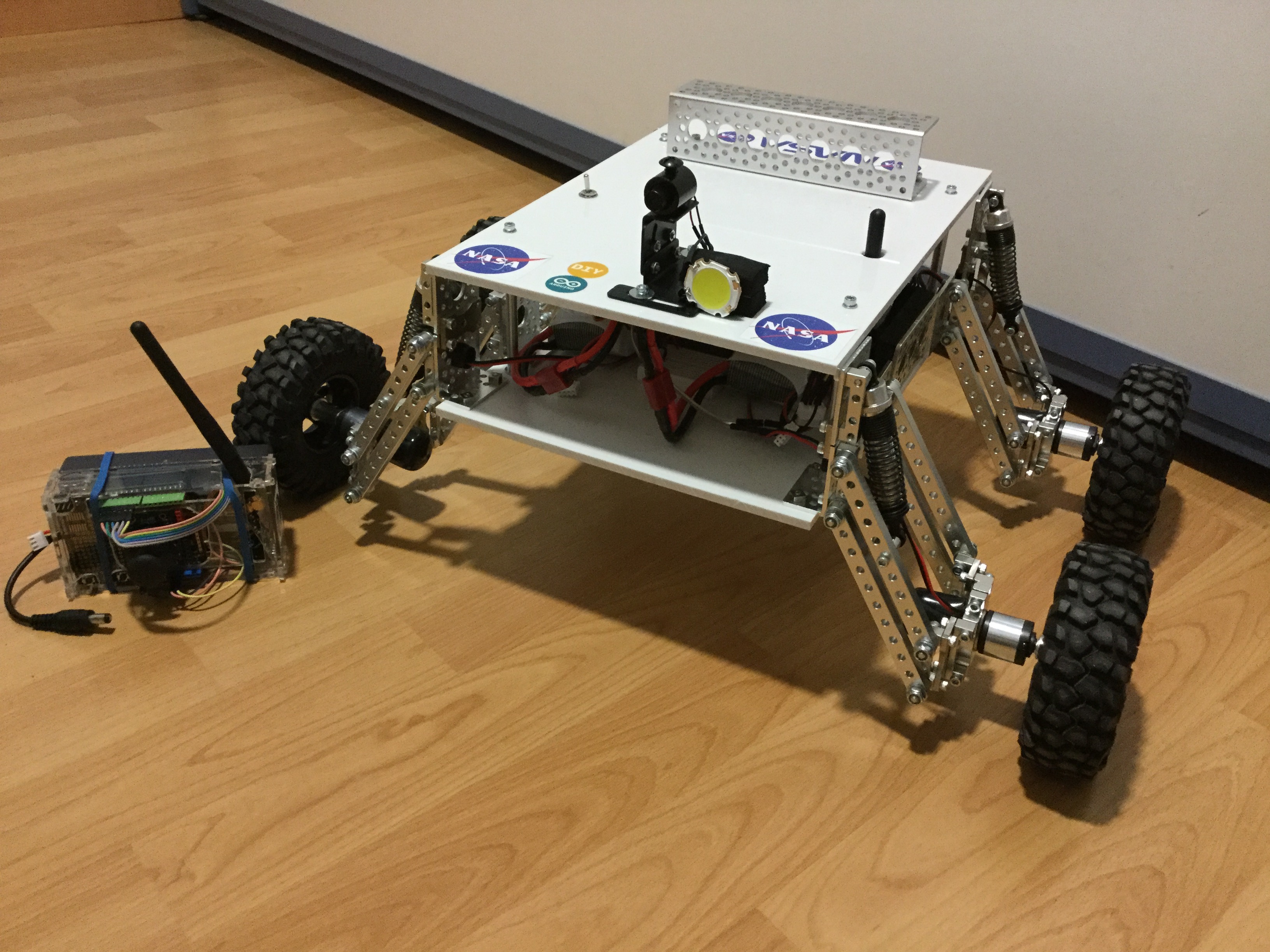
Se trata de una plataforma robótica controlada por radiofrecuéncia. El vehículo responde a las acciones sobre un joystick, puede ir hacia adenate, hacia atrás o girar a izquierda o derecha. La velocidad será mayor o menor dependiendo del desplazamiento del joystick, para girar el vehículo debe estar parado y realiza el giro en modo tanque. En el joystick de control hay dos pulsadores uno permite encender o apagar una luz frontal, y el otro pulsador permite encender o apagar un puntero laser.
Se pueden distinguir cuatro partes que constituyen el vehículo:
– Mecánica
– Electrónica
– Comunicaciones
– Programación

MECANICA
Está formada por el chasis, con elementos de plástico ABS y aluminio; y cuatro motores , uno por cada rueda. El giro se realiza rotando las ruedas de un lado en un sentido, y las del otro lado en sentido contrario; cada rueda dispone de un sistema de suspensión. Los motores están alimentados por dos baterías en paralelo de 11,1v; estas baterias suministran también la electricidad al LED frontal y al laser.
| DIMENSIONES | |
|---|---|
| Ancho | 50cm |
| Largo | 34cm |
| Alto | 27cm |
| Peso | 3,5Kg |
| MOTOR DC DE ESCOBILLAS (x4) | |
|---|---|
| Rango de funcionamiento | 3v – 12v |
| Voltaje nominal | 12v |
| Velocidad en vacio | 116RPM |
| Corriente en vacio | 0,20A |
| Par de arranque | 115N.cm |
| Corriente de arranque | 4,9A |
| Potencia de salida de máxima eficiencia | 2,7w |
| Tipo engranage / relación | Planetario / 104:1 |
| BATERIA LIPO 3S AEROENERGY (x2) | |
|---|---|
| Voltaje | 11,1v |
| Capacidad | 5000mAh |
| Intensidad máxima en continua | 125A |
| Intensidad máxima en discontinua | 250A |
| Peso | 402g |
ELECTRONICA
La electrónica del vehículo se compone de la placa Arduino MEGA 2560, el Arduino Motor shield y módulo de comunicación de radio frecuencia NRF24. Sobre la placa MEGA 2560 reside toda la programación del coche y las conexiones con todos los componentes electrónicos del vehículo, el Motor shield suministra la potencia necesaria a los motores y el módulo de comunicaciones recibe la señal de radiofracuencia del joystick con las ordenes de movimiento para el vehículo. Todo el sistema esta alimentado por las batería de 11,1v. El vehículo lleva incorporado un LED de alta potencia y un puntero laser.
| PUNTERO LASER | |
|---|---|
| Potencia | 2,5mW (clase 3R) |
| Longitud de onda | 660nm (rojo) |
| Voltaje | 3v |
| Corriente | <45mA |
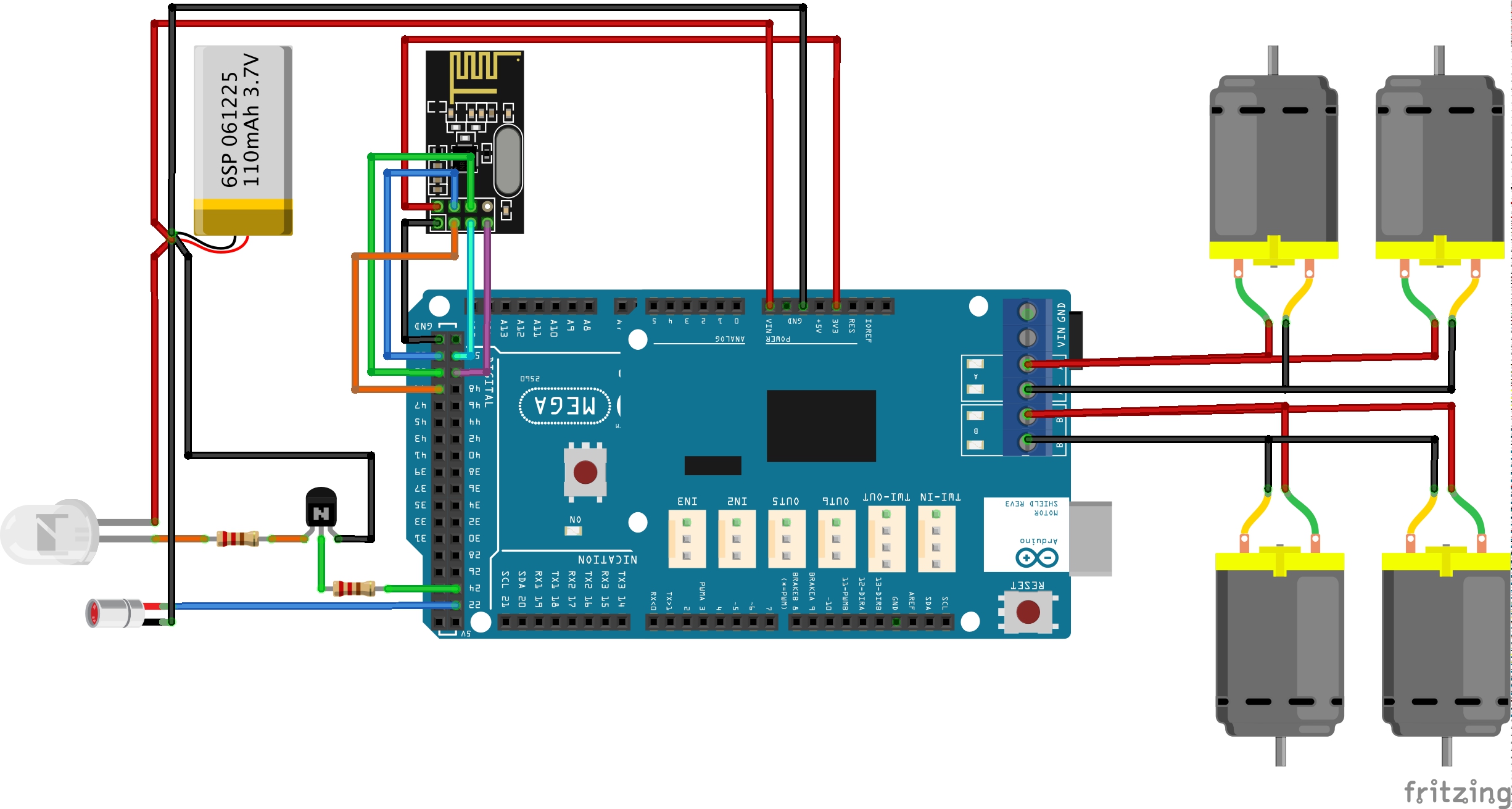
COMUNICACIONES
La comunicación se realiza mediante una señal de radio frecuencia de 2,4Ghz.
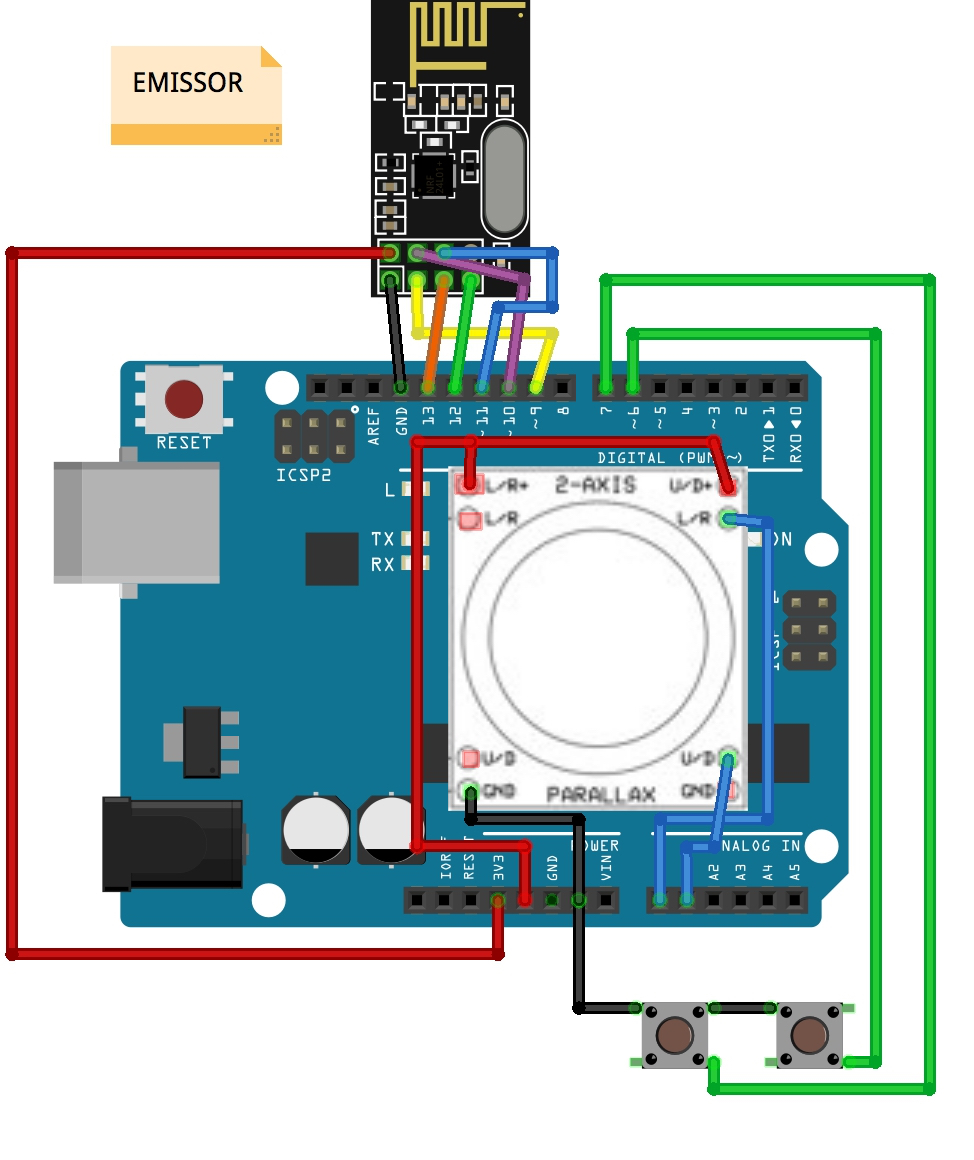
El emisor consta de un joystick, una placa Arduino UNO, un módulo de comunicaciones NRF24 y una bateria LIPO (7,4v / 1200mAh.).
El receptor consta de un módulo de comunicaciones NRF24 conectada a la placa Arduino MEGA ubicada en el vehículo.
PROGRAMACION
La programación de todo el conjunto se divide en dos elementos:
- Arduino MEGA: contiene la programación del módulo de comunicaciones que recibe la señal y la tranforma en información útil para manejar el vehículo. La programación de los movimientos del vehículo (adelante/atrás, velocidad, giros) en función de los movimientos del joystick. Finalmente la programación del encendido y apagado del LED y el laser en base a la pulsación de dos botones ubicados en el dispositivo emisor.
- Arduino UNO: contiene la programación del módulo de comunicaciones para enviar la señal con la información correspondiente del movimiento del joystick y la pulsación de los botones para controlar al vehículo.
FUNCIONAMIENTO
Para poner en funcionamiento todo el sistema debemos conectar el coche mediante un interruptor, y el emisor enchufando el conector de la bateria a la placa Arduino UNO. A partir de este momento ya podemos manejar el vehículo.
Joystick hacia arriba: movimiento hacia adelante, más desplazamiento más velocidad.
Joystick hacia abajo: movimiento hacia atrás, más desplazamiento más velocidad.
Joystick hacia la derecha: giro a la derecha, el vehículo no se desplaza.
Joystick hacia la izquierda: giro a la izquierda, el vehículo no se desplaza.
Botón derecha: enciende/apaga laser.
Botón izquierda: enciende/apaga LED.
VIDEO DE FUNCIONAMIENTO
Rover-004
Rover-004
Se trata de una plataforma robótica controlada por radiofrecuéncia. El vehículo responde a las acciones sobre un joystick, puede ir hacia adelante, hacia atrás o girar a izquierda o derecha; el giro lo realiza mediante un conjunto de engranajes que mediante un mecanismo gira la dirección de las ruedas delanteras. Tiene dos velocidades lenta/rápida, se selecciona pulsando uno de los dos botones del joystick. Finalmente, pulsando el otro botón se encienden/apagan un conjunto de dos led’s frontales de alta potencia, un laser frontal y dos led’s rojos posteriores.
Se pueden distinguir cuatro partes que constituyen el vehículo:
– Mecánica
– Electrónica
– Comunicaciones
– Programación

MECANICA
Está formada por el chasis, con elementos de plástico ABS y aluminio; cuatro motores eléctricos, uno por cada rueda y un servomotor. El giro se realiza mediante unos engranajes controlados por el servomotor que giran la dirección de las ruedas delanteras delanteras. Los motores están alimentados por dos baterías en paralelo de 11,1v; estas baterias suministran también la electricidad al sistema de luces y a la placa Arduino MEGA. El servomotor está alimentado por una batería de 7,4v.
| DIMENSIONES | |
|---|---|
| Ancho | 30cm |
| Largo | 50cm |
| Alto | 35cm |
| Peso | 4Kg |
| MOTOR DC DE ESCOBILLAS (x4) | |
|---|---|
| Rango de funcionamiento | 3v – 12v |
| Voltaje nominal | 12v |
| Velocidad en vacio | 624RPM |
| Corriente en vacio | 0,20A |
| Par de arranque | 30N.cm |
| Corriente de arranque | 4,9A |
| Potencia de salida de máxima eficiencia | 2,7w |
| Tipo engranage / relación | Planetario / 19:1 |
| SERVOMOTOR | |
|---|---|
| Rango de funcionamiento | 4.8v – 6v |
| Rango PWM | 600-2400 microseg. |
| Velocidad en vacio | 1,5 seg/360º |
| Par de arranque | 120N.cm |
| BATERIA LIPO 3S AEROENERGY (x2) | |
|---|---|
| Voltaje | 11,1v |
| Capacidad | 5000mAh |
| Intensidad máxima en continua | 125A |
| Intensidad máxima en discontinua | 250A |
| Peso | 402g |
| BATERIA LIPO 3S AEROENERGY (x1) | |
|---|---|
| Voltaje | 7,4v |
| Capacidad | 5200mAh |
| Intensidad máxima en continua | 125A |
| Intensidad máxima en discontinua | 250A |
| Peso | 380g |
ELECTRONICA
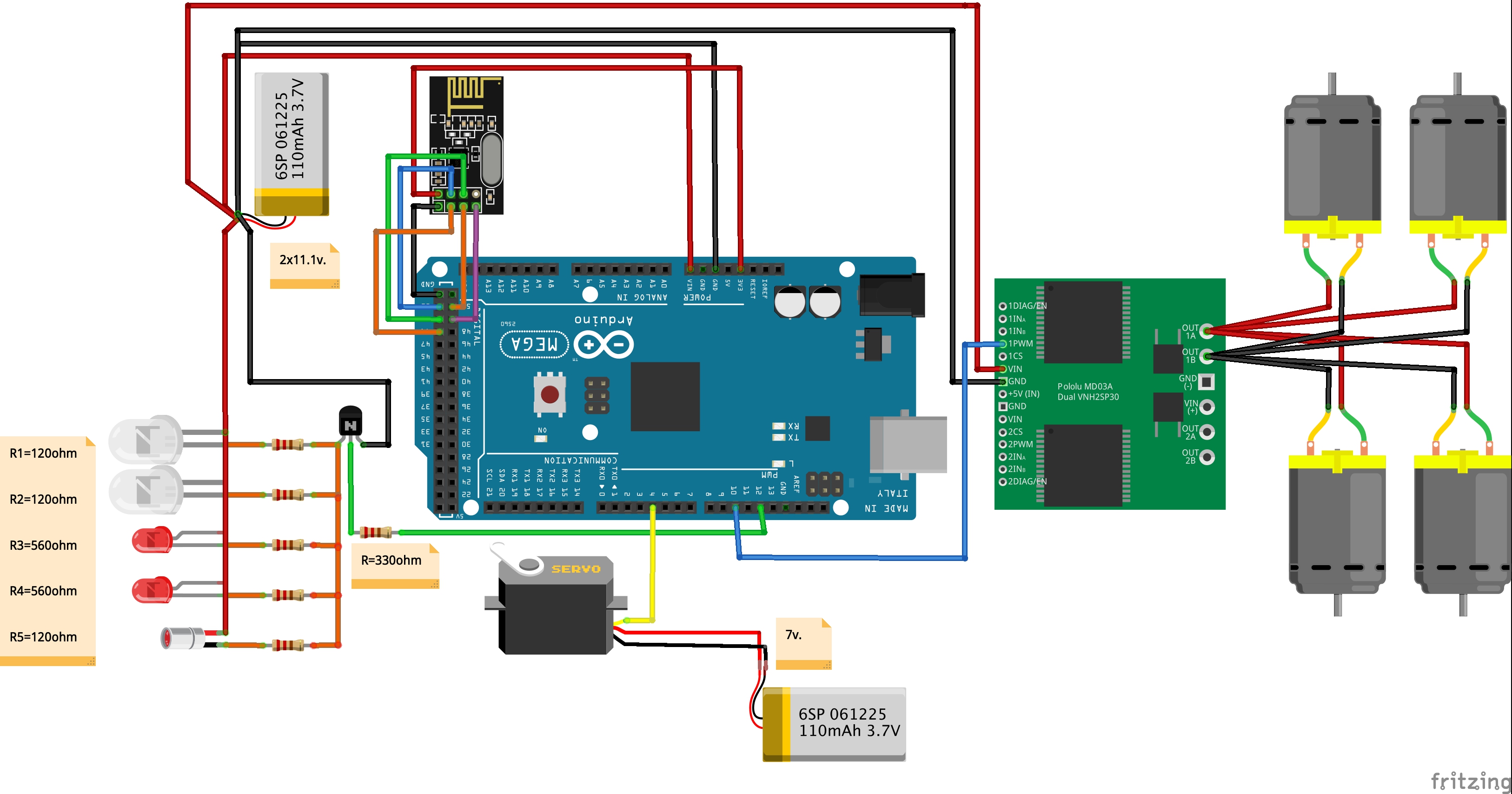
La electrónica del vehículo se compone de la placa Arduino MEGA 2560, el módulo de potencia y el módulo de comunicación de radio frecuencia NRF24. Sobre la placa MEGA 2560 reside toda la programación del coche y las conexiones con todos los componentes electrónicos del vehículo, el módulode potencia suministra la potencia necesaria a los motores y el módulo de comunicaciones recibe la señal de radiofracuencia del joystick con las ordenes de movimiento para el vehículo. El vehículo lleva incorporado un sistema de luces formado por 2 LED de alta potencia, 2 LED posteriores rojos y un puntero laser.
| PUNTERO LASER | |
|---|---|
| Potencia | 2,5mW (clase 3R) |
| Longitud de onda | 660nm (rojo) |
| Voltaje | 3v |
| Corriente | <45mA |
COMUNICACIONES
La comunicación se realiza mediante una señal de radio frecuencia de 2,4Ghz.
El emisor consta de un joystick, una placa Arduino UNO, un módulo de comunicaciones NRF24 y una bateria LIPO (7,4v / 1200mAh.).
El receptor consta de un módulo de comunicaciones NRF24 conectada a la placa Arduino MEGA ubicada en el vehículo.
PROGRAMACION
La programación de todo el conjunto se divide en dos elementos:
- Arduino MEGA: contiene la programación del módulo de comunicaciones que recibe la señal y la tranforma en información útil para manejar el vehículo. La programación de los movimientos del vehículo (adelante/atrás, velocidad, giros) en función de los movimientos del joystick. Finalmente la programación del encendido y apagado del LED y el laser en base a la pulsación de dos botones ubicados en el dispositivo emisor.
- Arduino UNO: contiene la programación del módulo de comunicaciones para enviar la señal con la información correspondiente del movimiento del joystick y la pulsación de los botones para controlar al vehículo.
FUNCIONAMIENTO
Para poner en funcionamiento todo el sistema debemos conectar el coche mediante un interruptor, y el emisor enchufando el conector de la bateria a la placa Arduino UNO. A partir de este momento ya podemos manejar el vehículo.
Joystick hacia arriba: movimiento hacia adelante, más desplazamiento más velocidad.
Joystick hacia abajo: movimiento hacia atrás, más desplazamiento más velocidad.
Joystick hacia la derecha: giro a la derecha.
Joystick hacia la izquierda: giro a la izquierda.
Botón derecha: velocidad alta/velocidad baja cambia la velocidad del coche.
Botón izquierda: enciende/apaga luces.
VIDEO DE FUNCIONAMIENTO
https://robotica.educacion.club/wp-content/uploads/2019/06/Rover004.mov