Robot-001
Se trata de un brazo robot, se pueden distinguir cuatro partes que constituyen el sistema robótico:
– Mecánica
– Electrónica
– Comunicaciones
– Programación
MECANICA
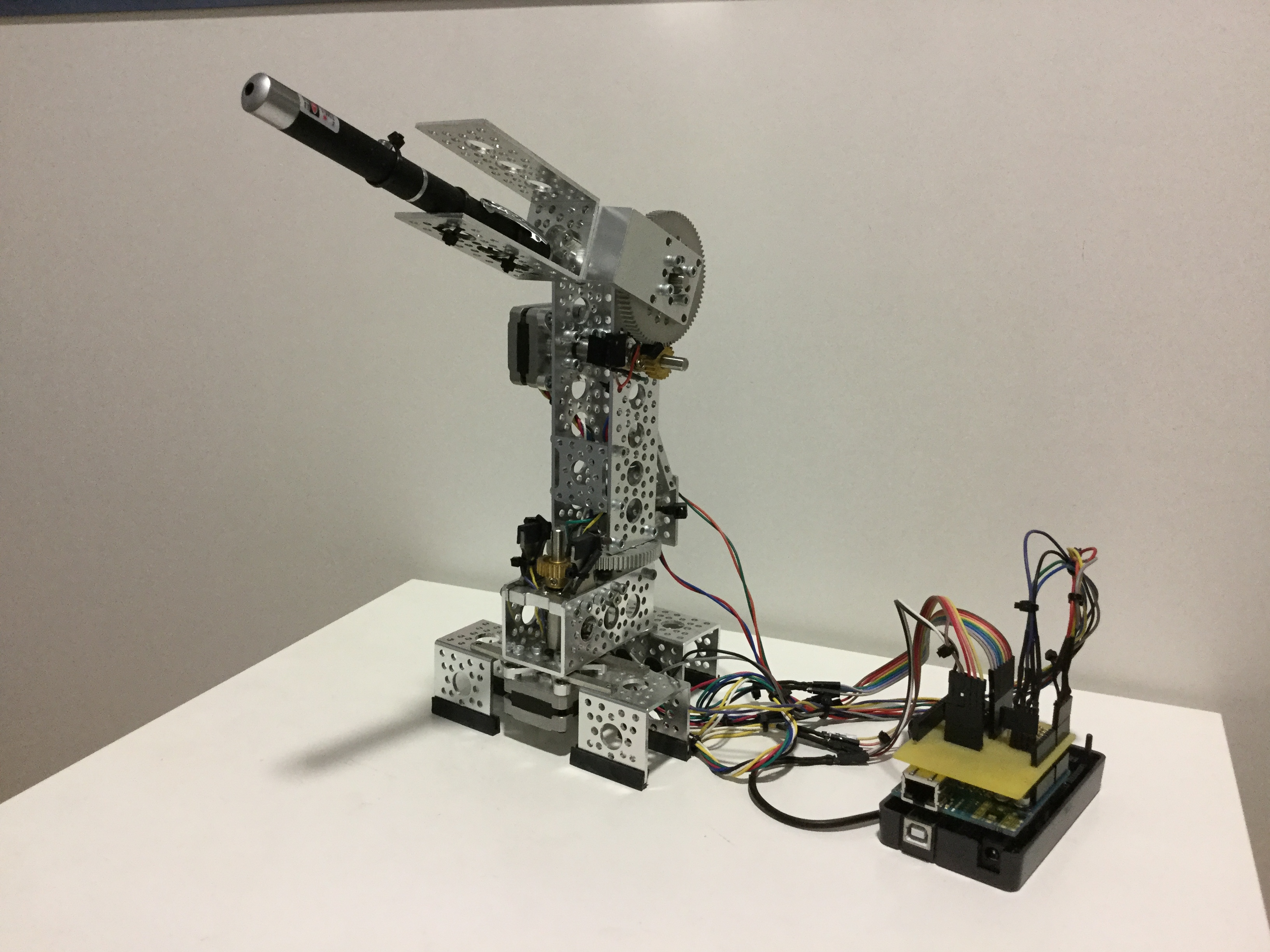
Está formada por la propia estructura del robot y dos motores.
Se trata de un robot con dos grados de libertad, es decir dispone de dos articulaciones. Una articulación permite una rotación en un ángulo azimutal (eje vertical), y la otra en un ángulo de altitud (eje horizontal).
| EJE | CORONA (nº dientes) | PIÑON 8 (nº dientes) | RELACION DE TRANSMISION |
|---|---|---|---|
| Azimut | 72 | 24 | 3:1 |
| Altitud | 76 | 20 | 3.8:1 |
Los actuadores son dos motores paso a paso unipolares.
| TIPO MOTOR | DIMENSIONES | ANGULO DE PASO | VOLTAGE (V) | INTENSIDAD (A) | PAR (Kg.cm) |
|---|---|---|---|---|---|
| Paso a Paso (Unipolar) | NEMA 15 | 1.8º | 6.5 | 0.5 | 0.8 |
La combinación de las características mecánicas del robot, y como este ha sido programado, permite la siguiente resolución angular.
| EJE | RESOLUCION (grados/paso) |
|---|---|
| Azimut | 2.4º |
| Altitud | 1.89º |
El Robot dispone de unos sensores de contacto que limitan el ángulo de rotación azimutal y de altitud, cuando el brazo alcanza el tope la rotación se detiene. El robot posee una posición de inicialización paralela respecto al suelo, partiendo de la posición de inicialización los ángulos máximos de funcionamiento son:
| EJE | INICIALIZACIÓN | ESTE | OESTE |
|---|---|---|---|
| Azimut | 0º | 105,6º | 103,2º |
| EJE | INICIALIZACIÓN | POSITIVA | NEGATIVA |
|---|---|---|---|
| Altitud | 0º | 202,23º | -34,23º |
ELECTRONICA
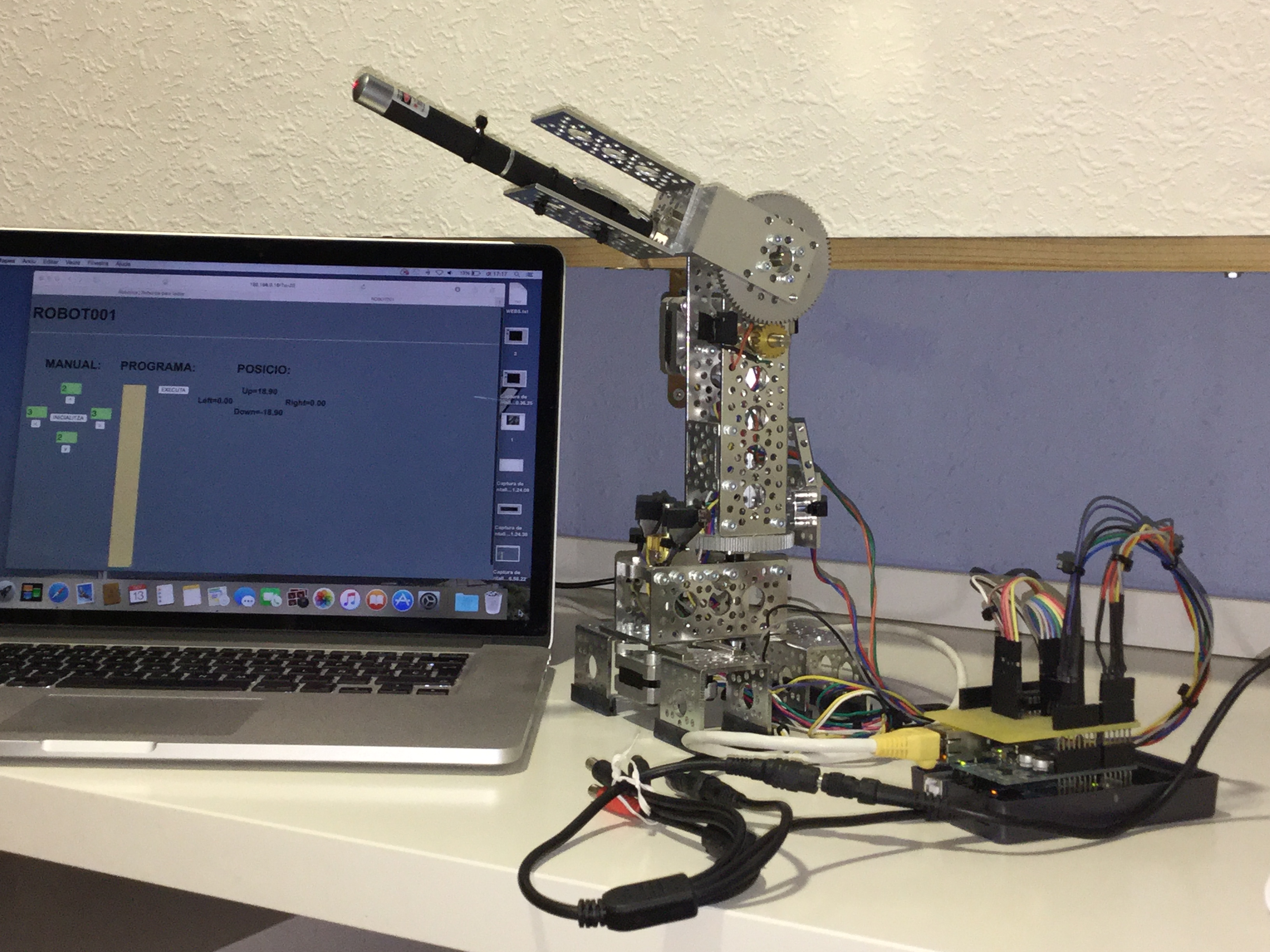
La electrónica que controla el robot está basada en el Arduino MEGA 2560 y el shield Arduino Ethernet. Por otro lado se ha incorporado un shield basado en el chip ULN2803A, que es el encargado de suministrar la potencia necesaria a los dos motores, y de regular el flujo de corriente en los sensores.

COMUNICACIONES
La comunicación se realiza mediante el protocolo TCP/IP, a través de una conexión Ethernet. Esto hace posible que el robot sea accesible desde Internet. Es decir, se puede ubicar el robot en algun lugar remoto e igualmente poder acceder a él. Al robot se le ha asignado una dirección IP y actua como servidor web, cuando nos conectamos al robot este retorna un formulario mediante el cual podemos indicar el ángulo y la dirección de rotación de cada uno de los motores.
PROGRAMACION
La programación del robot ha implicado dos aspectos fundamentales. Por un lado la programación de la tarjeta Arduino, configuración de las definiciones, programacion de las comunicaciones y programación del funcionamiento de los motores. Por otro lado la configuración de la página web (formulario HTML) que retorna el robot cuando nos conectamos a él, el código HTML se encuentra incorporado en el propio programa de la tarjeta Arduino.
FUNCIONAMIENTO
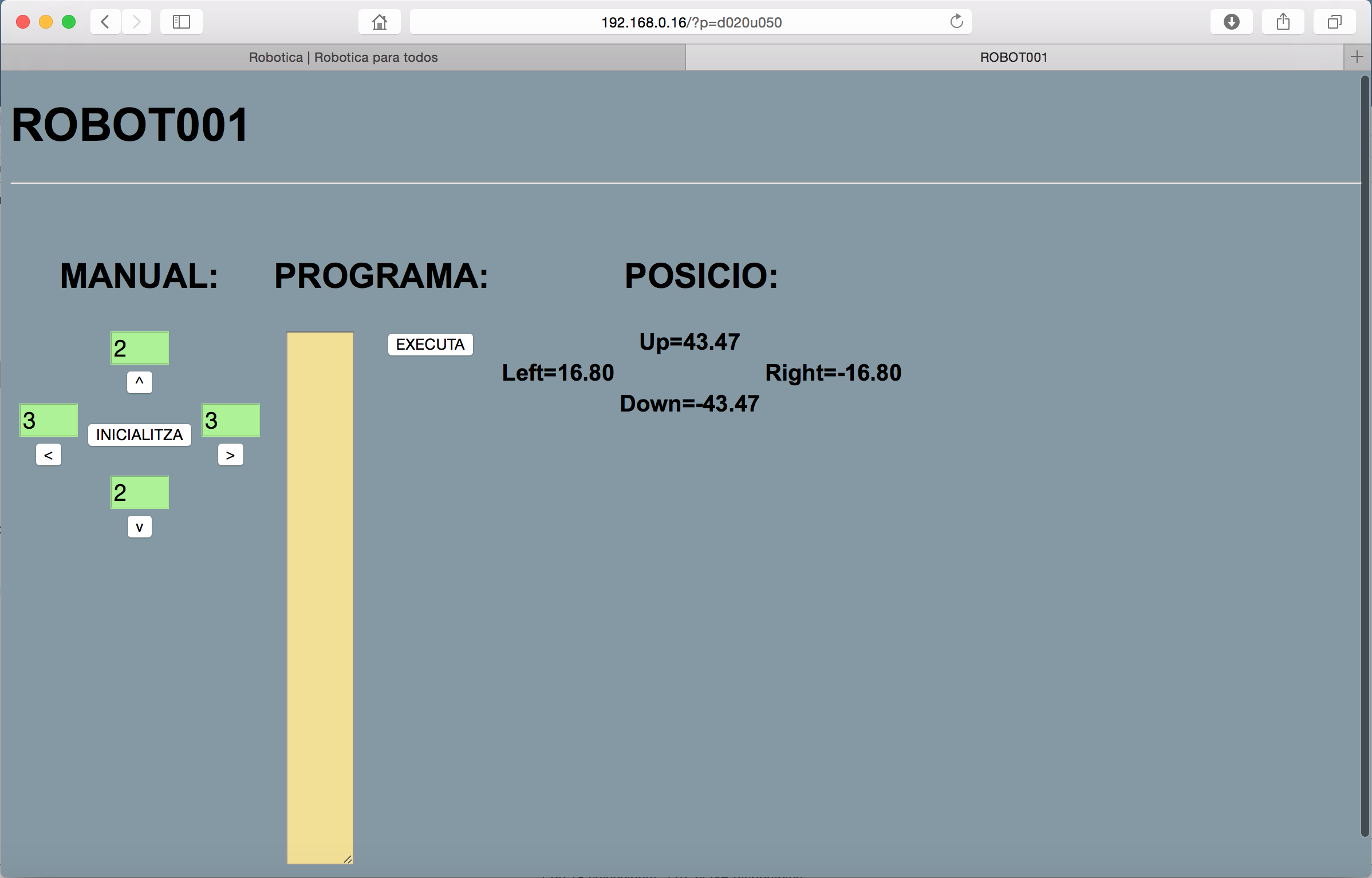
El robot tiene dos modos de funcionamiento:
- Manual: se indican directamente los grados de rotación que se desea que gire el brazo robótico en una determinada dirección.
- Programable: se puede indicar una serie de instrucciones que el robot irá ejecutando secuencialmente.
El formato de una instrucción es: IXXX, el conjunto de instrucciones es el siguiente:
UXXX (UP): desplazamiento de altitud positivo, XXX indica los grados de desplazamiento.
DXXX (DOWN): desplazamiento de altitud negativo, XXX indica los grados de desplazamiento.
RXXX (RIGHT): desplazamiento azimutal oeste, XXX indica los grados de desplazamiento.
LXXX (LEFT): desplazamiento azimutal este, XXX indica los grados de desplazamiento.
TXXX (TIME): detiene el movimiento del brazo, XXX indica el tiempo en segundos.
CXXX (CYCLE): a partir de esta instrucción, las instrucciones posteriores se repetiran en forma de bucle, XXX indica el número de bucles que se ejecutarán.
Finalmente comentar que cuando el brazo detiene su movimiento, la pantalla muestra la posición en grados del brazo robótico, si previamente se ha inicializado su posición.
VIDEO DE FUNCIONAMIENTO
Leave a Comment
You must be logged in to post a comment.