Rover-001
Se trata de un coche que se controla a través de una red wifi. Actua como un servidor web y cuando nos conectamos nos retorna una página web con unos botones que nos permite su control. Se pueden distinguir cuatro partes que constituyen el vehículo:
– Mecánica
– Electrónica
– Comunicaciones
– Programación

MECANICA
Está formada por el chasis del vehículo y cuatro motores, uno por cada rueda. El giro se realiza rotando las ruedas de un lado en un sentido, y las del otro lado en sentido contrario.
ELECTRONICA
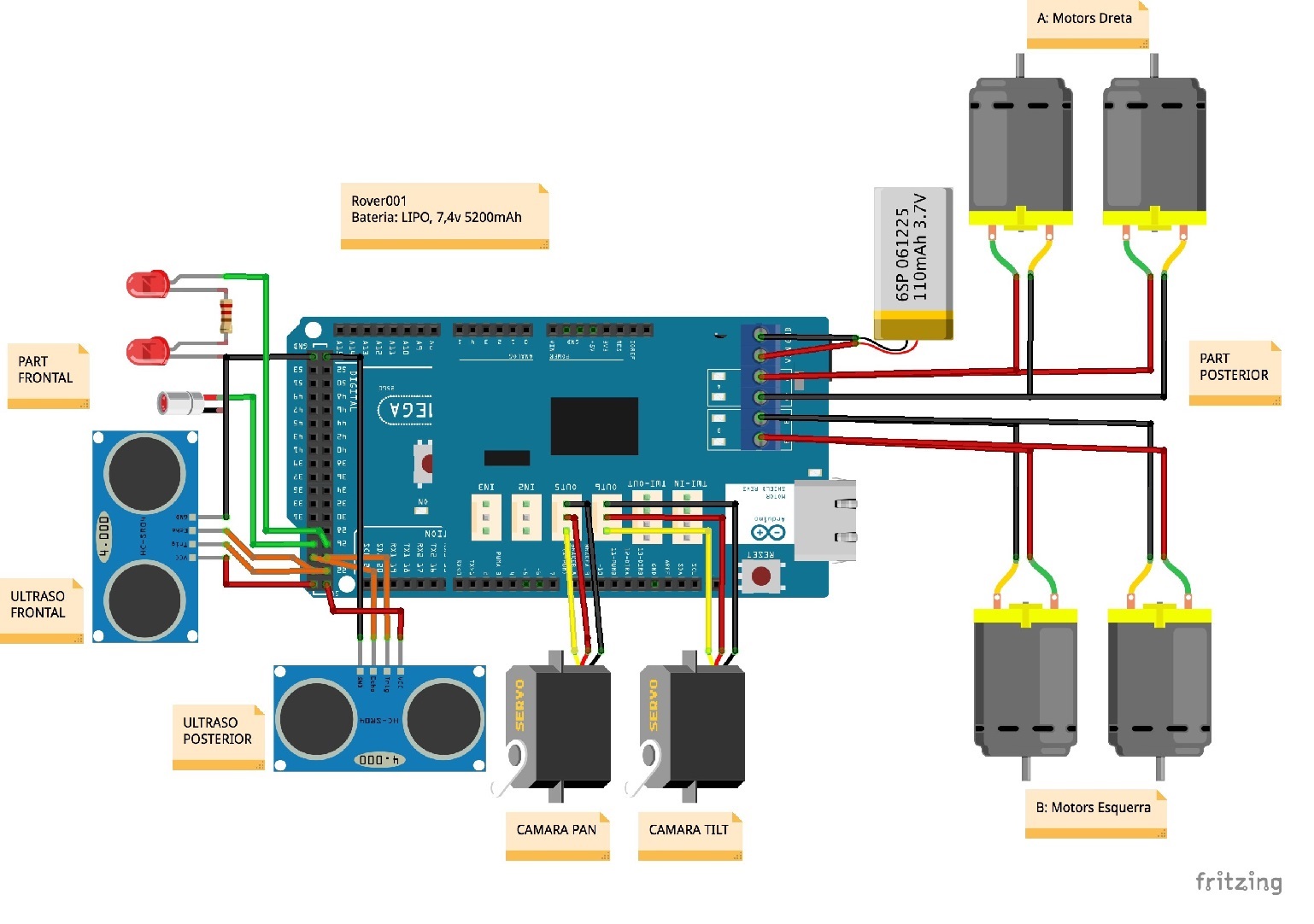
La electrónica del vehículo se compone de la placa Arduino MEGA 2560, el Arduino Motor shield y el Arduino Ethernet shield. Sobre la placa MEGA 2560 reside toda la programación del coche y las conexiones con todos los componentes electrónicos del vehículo, el Motor shield suministra la potencia necesaria a los motores y el Ethernet shield está conectado a un router que genera una red wifi, propia del vehículo, que permite la conexión de cualquier dispositivo electrónico con el coche.
Por otro lado el vehículo lleva incorporados los siguientes dispositivos:
- LED’s: frontales (blancos) y posteriores (rojos) de iluminación.
- Sensores de ultrasonidos: uno frontal y otro posterior. Detiene el coche si está a punto de chocar con algún objeto.
- Cámara IP: envia imágenes a través de la página web cuando establecemos la conexión con el coche. Se puede controlar la dirección mediante dos servomotores que controlan la posición azimt/altitud (pan/tilt) de la cámara.
COMUNICACIONES
La comunicación se realiza mediante el protocolo TCP/IP, a través de una conexión Ethernet. Esto hace posible que el robot sea accesible desde Internet. Es decir, se puede ubicar el robot en algun lugar remoto e igualmente poder acceder a él. Al robot se le ha asignado una dirección IP y actua como servidor web, cuando nos conectamos al robot este retorna un formulario mediante el cual podemos indicar el ángulo y la dirección de rotación de cada uno de los motores.
PROGRAMACION
La programación del coche ha implicado dos aspectos fundamentales.
Por un lado la programación de la tarjeta Arduino, configuración de las definiciones, programación de las comunicaciones y programación del funcionamiento de los motores y dispositivos electrónicos.
Por otro lado la configuración de la página web (formulario HTML) que retorna el vehículo cuando nos conectamos a él, el código HTML se encuentra incorporado en el propio programa de la tarjeta Arduino.
FUNCIONAMIENTO
Para poner en funcionamiento el vehículo debemos conectar por un lado toda electronica del coche, por otro lado las comunicaciones y finalmente la cámara.
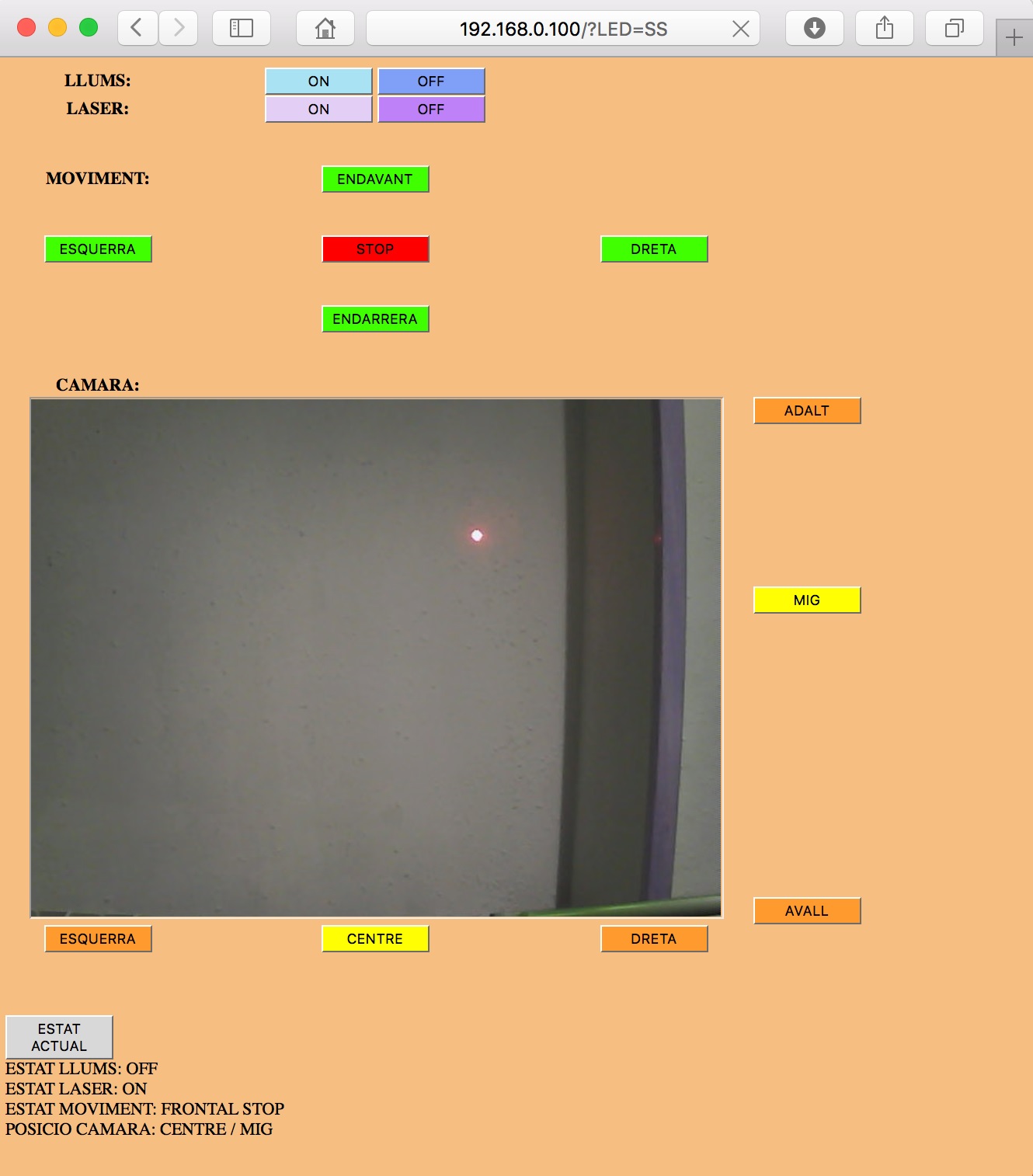
Para controlar el coche deberemos conectarnos a la red wifi, y posteriormente mediante un navegador conectarnos a la dirección IP del servidor (la placa Arduino actua como servidor web). La respuesta del servidor es una pagina web con unos botones que nos permitirá enviar ordenes al coche. La página dispone de un marco donde aparece la imagen captada por la cámara. Los sensores de ultrasonidos detenienen el coche en caso que se vaya a producir una colisión.
Los botones para enviar instrucciones al coche son:
Luz ON/OFF
Laser ON/OFF
Dirección IZQUIERDA/DERECHA/ADELANTE/ATRAS/PARAR
Movimiento cámara AZIMUT/ALTURA