Rover-003
Se trata de una plataforma robótica controlada por radiofrecuéncia. El vehículo responde a las acciones sobre un joystick, puede ir hacia adenate, hacia atrás o girar a izquierda o derecha. La velocidad será mayor o menor dependiendo del desplazamiento del joystick, para girar el vehículo debe estar parado y realiza el giro en modo tanque. En el joystick de control hay dos pulsadores uno permite encender o apagar una luz frontal, y el otro pulsador permite encender o apagar un puntero laser.
Se pueden distinguir cuatro partes que constituyen el vehículo:
– Mecánica
– Electrónica
– Comunicaciones
– Programación
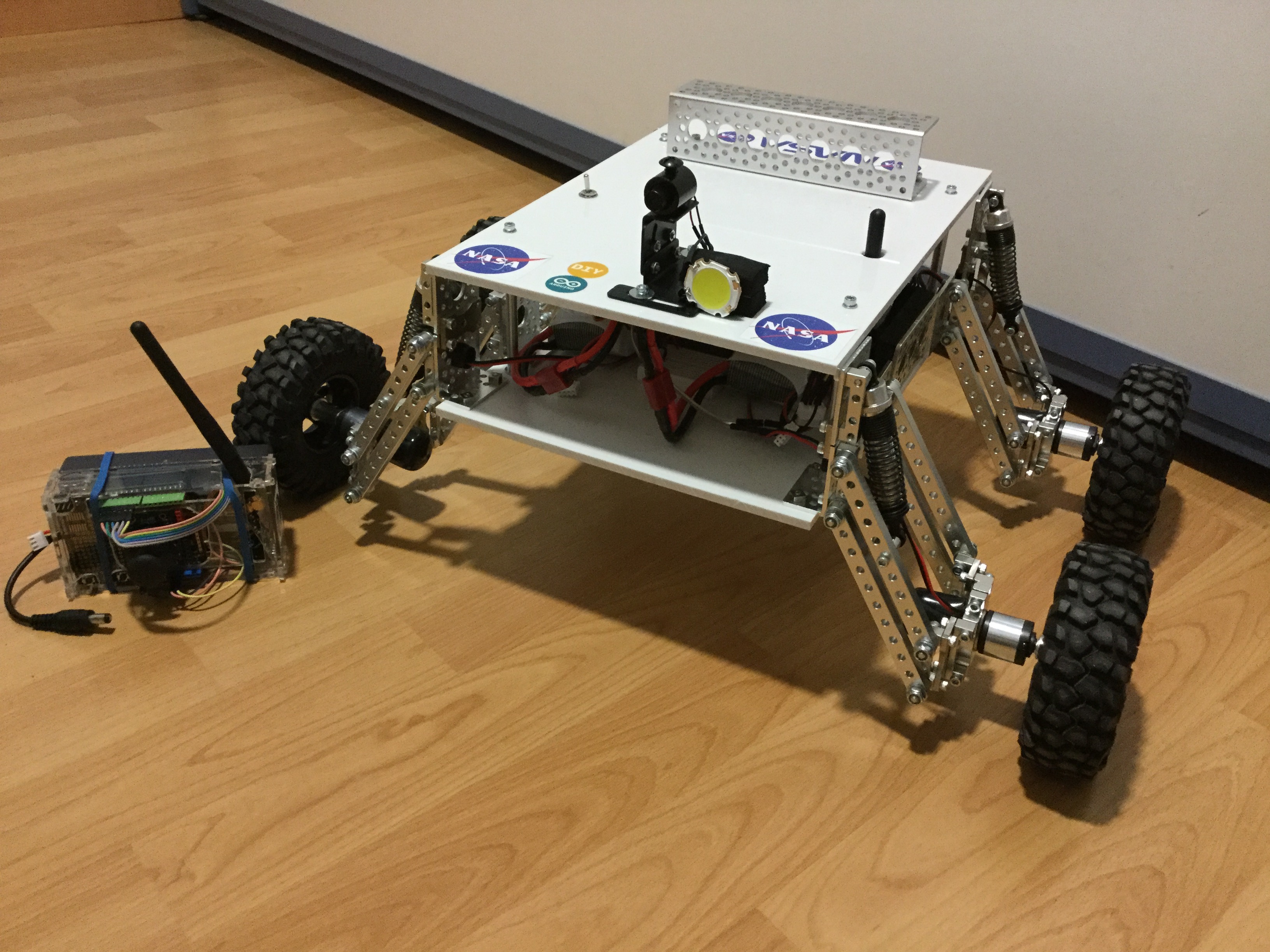
MECANICA
Está formada por el chasis, con elementos de plástico ABS y aluminio; y cuatro motores , uno por cada rueda. El giro se realiza rotando las ruedas de un lado en un sentido, y las del otro lado en sentido contrario; cada rueda dispone de un sistema de suspensión. Los motores están alimentados por dos baterías en paralelo de 11,1v; estas baterias suministran también la electricidad al LED frontal y al laser.
| DIMENSIONES | |
|---|---|
| Ancho | 50cm |
| Largo | 34cm |
| Alto | 27cm |
| Peso | 3,5Kg |
| MOTOR DC DE ESCOBILLAS (x4) | |
|---|---|
| Rango de funcionamiento | 3v – 12v |
| Voltaje nominal | 12v |
| Velocidad en vacio | 116RPM |
| Corriente en vacio | 0,20A |
| Par de arranque | 115N.cm |
| Corriente de arranque | 4,9A |
| Potencia de salida de máxima eficiencia | 2,7w |
| Tipo engranage / relación | Planetario / 104:1 |
| BATERIA LIPO 3S AEROENERGY (x2) | |
|---|---|
| Voltaje | 11,1v |
| Capacidad | 5000mAh |
| Intensidad máxima en continua | 125A |
| Intensidad máxima en discontinua | 250A |
| Peso | 402g |
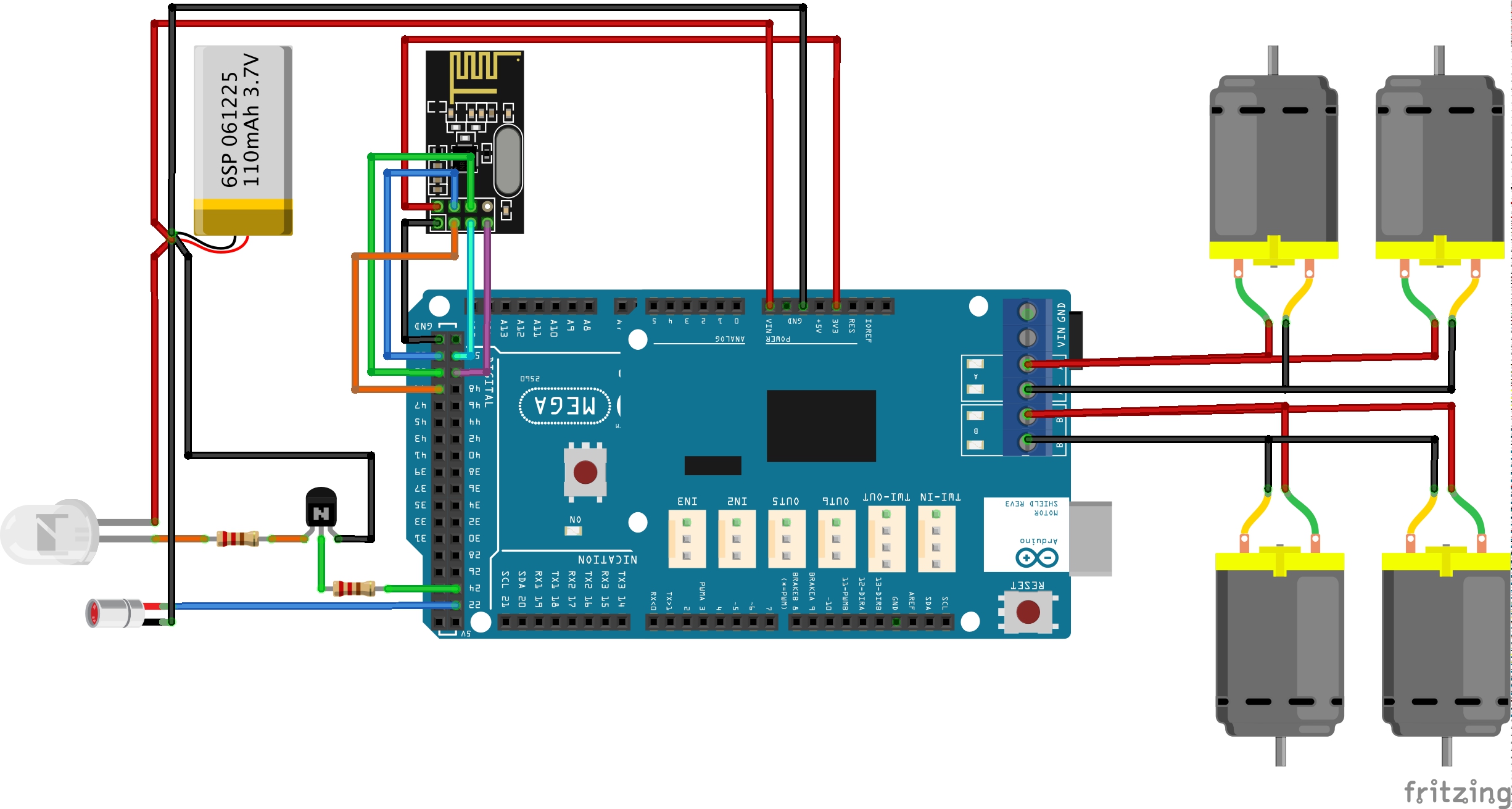
ELECTRONICA
La electrónica del vehículo se compone de la placa Arduino MEGA 2560, el Arduino Motor shield y módulo de comunicación de radio frecuencia NRF24. Sobre la placa MEGA 2560 reside toda la programación del coche y las conexiones con todos los componentes electrónicos del vehículo, el Motor shield suministra la potencia necesaria a los motores y el módulo de comunicaciones recibe la señal de radiofracuencia del joystick con las ordenes de movimiento para el vehículo. Todo el sistema esta alimentado por las batería de 11,1v. El vehículo lleva incorporado un LED de alta potencia y un puntero laser.
| PUNTERO LASER | |
|---|---|
| Potencia | 2,5mW (clase 3R) |
| Longitud de onda | 660nm (rojo) |
| Voltaje | 3v |
| Corriente | <45mA |
COMUNICACIONES
La comunicación se realiza mediante una señal de radio frecuencia de 2,4Ghz.
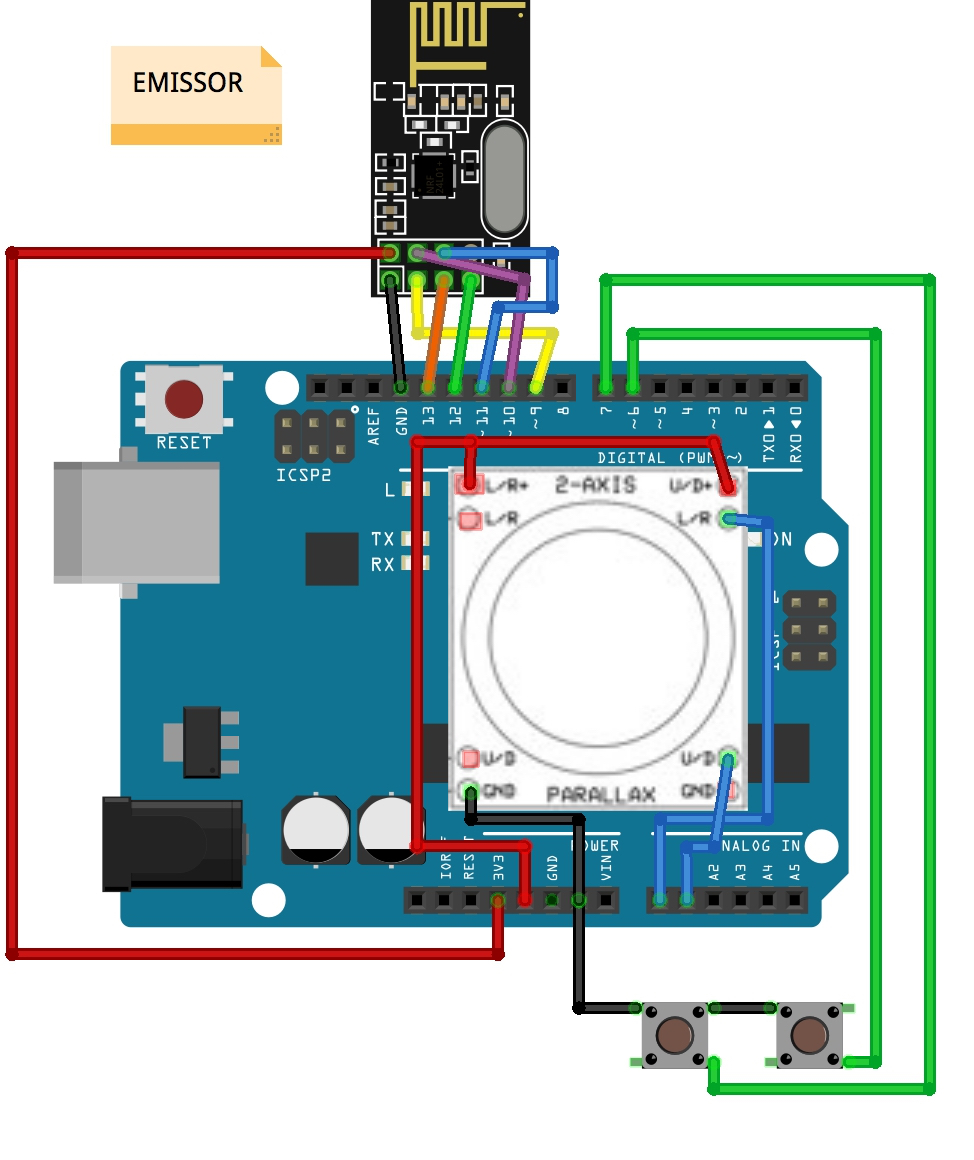
El emisor consta de un joystick, una placa Arduino UNO, un módulo de comunicaciones NRF24 y una bateria LIPO (7,4v / 1200mAh.).
El receptor consta de un módulo de comunicaciones NRF24 conectada a la placa Arduino MEGA ubicada en el vehículo.
PROGRAMACION
La programación de todo el conjunto se divide en dos elementos:
- Arduino MEGA: contiene la programación del módulo de comunicaciones que recibe la señal y la tranforma en información útil para manejar el vehículo. La programación de los movimientos del vehículo (adelante/atrás, velocidad, giros) en función de los movimientos del joystick. Finalmente la programación del encendido y apagado del LED y el laser en base a la pulsación de dos botones ubicados en el dispositivo emisor.
- Arduino UNO: contiene la programación del módulo de comunicaciones para enviar la señal con la información correspondiente del movimiento del joystick y la pulsación de los botones para controlar al vehículo.
FUNCIONAMIENTO
Para poner en funcionamiento todo el sistema debemos conectar el coche mediante un interruptor, y el emisor enchufando el conector de la bateria a la placa Arduino UNO. A partir de este momento ya podemos manejar el vehículo.
Joystick hacia arriba: movimiento hacia adelante, más desplazamiento más velocidad.
Joystick hacia abajo: movimiento hacia atrás, más desplazamiento más velocidad.
Joystick hacia la derecha: giro a la derecha, el vehículo no se desplaza.
Joystick hacia la izquierda: giro a la izquierda, el vehículo no se desplaza.
Botón derecha: enciende/apaga laser.
Botón izquierda: enciende/apaga LED.
VIDEO DE FUNCIONAMIENTO