Rover-004
Se trata de una plataforma robótica controlada por radiofrecuéncia. El vehículo responde a las acciones sobre un joystick, puede ir hacia adelante, hacia atrás o girar a izquierda o derecha; el giro lo realiza mediante un conjunto de engranajes que mediante un mecanismo gira la dirección de las ruedas delanteras. Tiene dos velocidades lenta/rápida, se selecciona pulsando uno de los dos botones del joystick. Finalmente, pulsando el otro botón se encienden/apagan un conjunto de dos led’s frontales de alta potencia, un laser frontal y dos led’s rojos posteriores.
Se pueden distinguir cuatro partes que constituyen el vehículo:
– Mecánica
– Electrónica
– Comunicaciones
– Programación
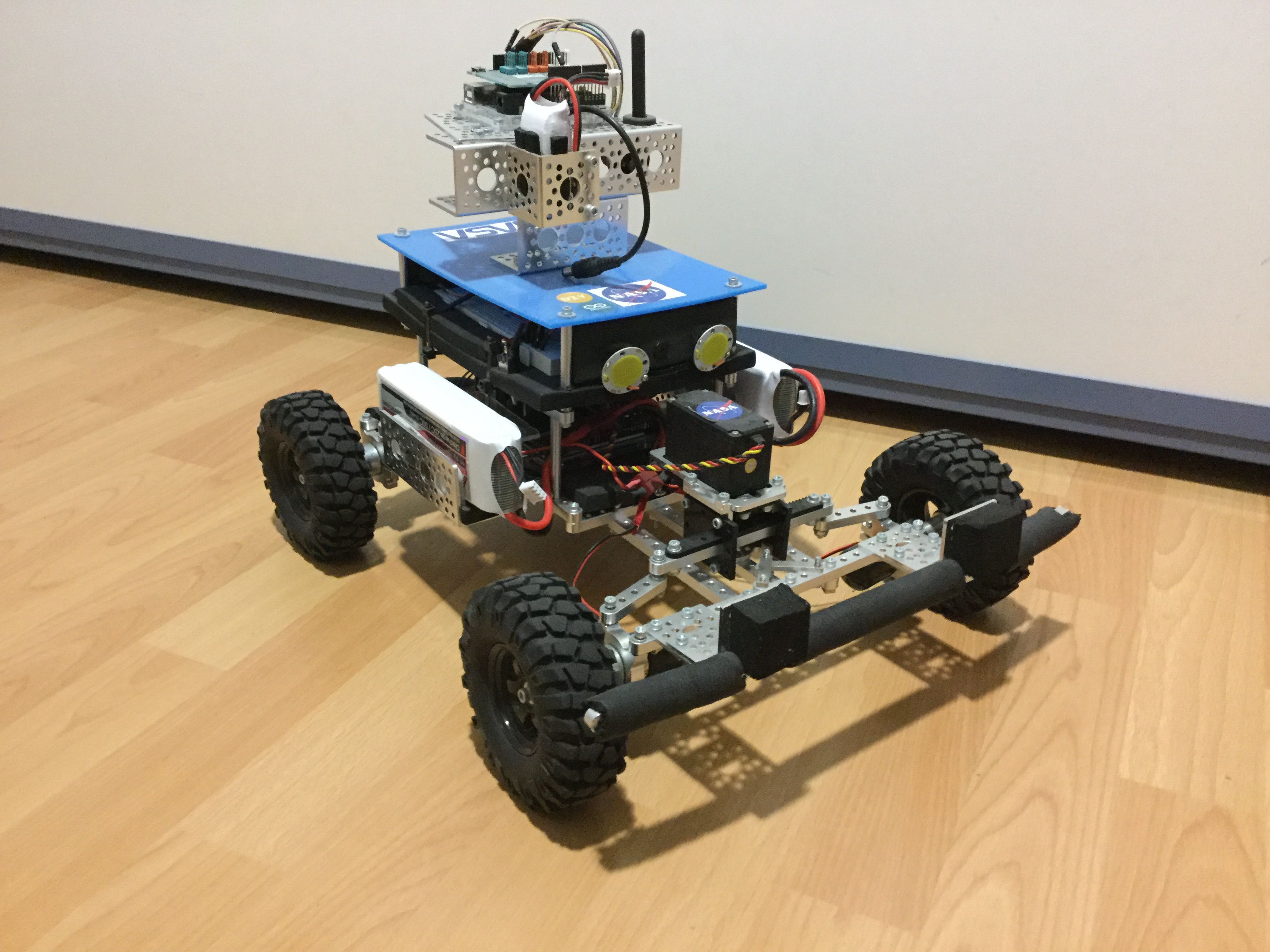
MECANICA
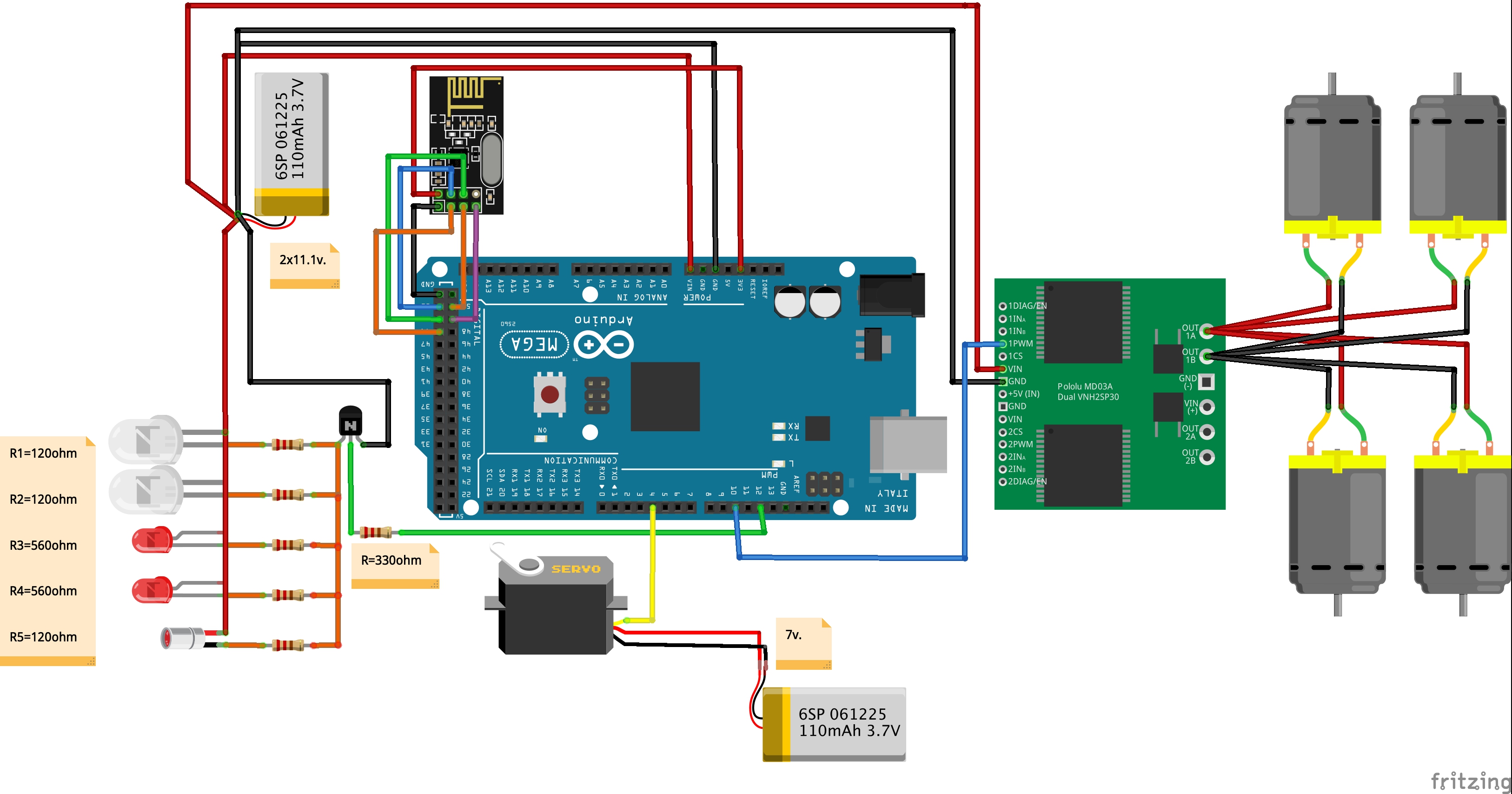
Está formada por el chasis, con elementos de plástico ABS y aluminio; cuatro motores eléctricos, uno por cada rueda y un servomotor. El giro se realiza mediante unos engranajes controlados por el servomotor que giran la dirección de las ruedas delanteras delanteras. Los motores están alimentados por dos baterías en paralelo de 11,1v; estas baterias suministran también la electricidad al sistema de luces y a la placa Arduino MEGA. El servomotor está alimentado por una batería de 7,4v.
| DIMENSIONES | |
|---|---|
| Ancho | 30cm |
| Largo | 50cm |
| Alto | 35cm |
| Peso | 4Kg |
| MOTOR DC DE ESCOBILLAS (x4) | |
|---|---|
| Rango de funcionamiento | 3v – 12v |
| Voltaje nominal | 12v |
| Velocidad en vacio | 624RPM |
| Corriente en vacio | 0,20A |
| Par de arranque | 30N.cm |
| Corriente de arranque | 4,9A |
| Potencia de salida de máxima eficiencia | 2,7w |
| Tipo engranage / relación | Planetario / 19:1 |
| SERVOMOTOR | |
|---|---|
| Rango de funcionamiento | 4.8v – 6v |
| Rango PWM | 600-2400 microseg. |
| Velocidad en vacio | 1,5 seg/360º |
| Par de arranque | 120N.cm |
| BATERIA LIPO 3S AEROENERGY (x2) | |
|---|---|
| Voltaje | 11,1v |
| Capacidad | 5000mAh |
| Intensidad máxima en continua | 125A |
| Intensidad máxima en discontinua | 250A |
| Peso | 402g |
| BATERIA LIPO 3S AEROENERGY (x1) | |
|---|---|
| Voltaje | 7,4v |
| Capacidad | 5200mAh |
| Intensidad máxima en continua | 125A |
| Intensidad máxima en discontinua | 250A |
| Peso | 380g |
ELECTRONICA
La electrónica del vehículo se compone de la placa Arduino MEGA 2560, el módulo de potencia y el módulo de comunicación de radio frecuencia NRF24. Sobre la placa MEGA 2560 reside toda la programación del coche y las conexiones con todos los componentes electrónicos del vehículo, el módulode potencia suministra la potencia necesaria a los motores y el módulo de comunicaciones recibe la señal de radiofracuencia del joystick con las ordenes de movimiento para el vehículo. El vehículo lleva incorporado un sistema de luces formado por 2 LED de alta potencia, 2 LED posteriores rojos y un puntero laser.
| PUNTERO LASER | |
|---|---|
| Potencia | 2,5mW (clase 3R) |
| Longitud de onda | 660nm (rojo) |
| Voltaje | 3v |
| Corriente | <45mA |
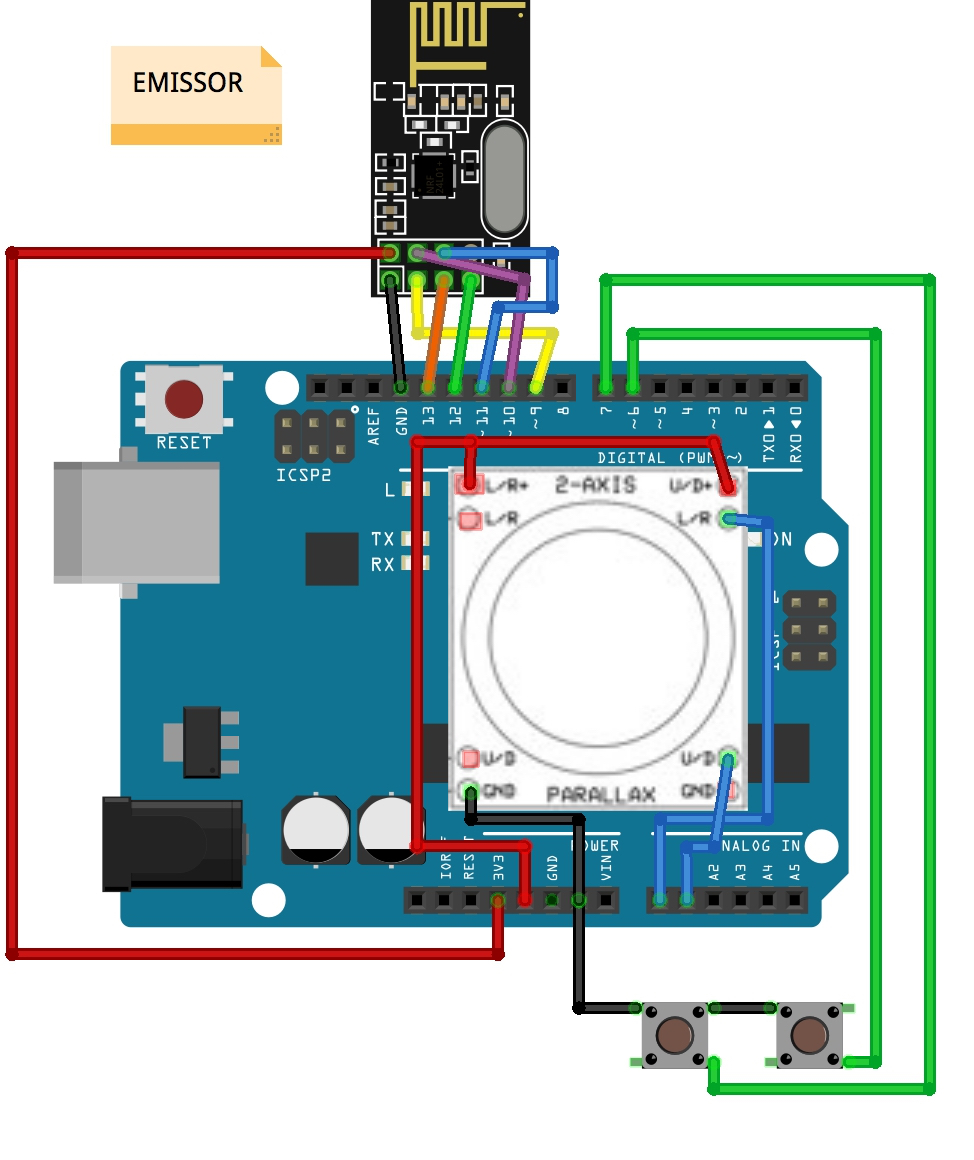
COMUNICACIONES
La comunicación se realiza mediante una señal de radio frecuencia de 2,4Ghz.
El emisor consta de un joystick, una placa Arduino UNO, un módulo de comunicaciones NRF24 y una bateria LIPO (7,4v / 1200mAh.).
El receptor consta de un módulo de comunicaciones NRF24 conectada a la placa Arduino MEGA ubicada en el vehículo.
PROGRAMACION
La programación de todo el conjunto se divide en dos elementos:
- Arduino MEGA: contiene la programación del módulo de comunicaciones que recibe la señal y la tranforma en información útil para manejar el vehículo. La programación de los movimientos del vehículo (adelante/atrás, velocidad, giros) en función de los movimientos del joystick. Finalmente la programación del encendido y apagado del LED y el laser en base a la pulsación de dos botones ubicados en el dispositivo emisor.
- Arduino UNO: contiene la programación del módulo de comunicaciones para enviar la señal con la información correspondiente del movimiento del joystick y la pulsación de los botones para controlar al vehículo.
FUNCIONAMIENTO
Para poner en funcionamiento todo el sistema debemos conectar el coche mediante un interruptor, y el emisor enchufando el conector de la bateria a la placa Arduino UNO. A partir de este momento ya podemos manejar el vehículo.
Joystick hacia arriba: movimiento hacia adelante, más desplazamiento más velocidad.
Joystick hacia abajo: movimiento hacia atrás, más desplazamiento más velocidad.
Joystick hacia la derecha: giro a la derecha.
Joystick hacia la izquierda: giro a la izquierda.
Botón derecha: velocidad alta/velocidad baja cambia la velocidad del coche.
Botón izquierda: enciende/apaga luces.
VIDEO DE FUNCIONAMIENTO
https://robotica.educacion.club/wp-content/uploads/2019/06/Rover004.mov